
Introduction
마늘은 예로부터 한국인의 식생활에서 중요한 조미료, 향신료 및 의약품으로 이용된 채소의 일종으로 마늘의 기능성은 항균작용(Cavallito and Bailey, 1944; Dewit et al., 1979), 항암작용(Kim and Chun, 1993), 혈압강하(Ruffin and Hunter, 1983), 콜레스테롤 저하 및 노화방지 작용(Kamanna and Chandrasekhara, 1983) 등 세계 10대 건강식품으로 선정 할 만큼 만성질환 예방의 기능성 소재로 알려져 있다(Kawabata et al., 1974; Nishimura et al., 1988; Watanabe, 1988; Kim et al., 2002; Lee et al., 2007). 마늘의 국내 재배면적은 24,864 ha, 생산량은 303,578톤(Korean Statistical Information Service, 2017)로 채소작물 중 고추, 배추, 무 다음으로 많이 재배되는 주요 작물이지만 생산비 증가, 마늘의 수입에 따른 가격하락, 인력 수급의 불안정으로 인해 재배 면적은 감소 추세에 있다(Choi et al., 2008).
마늘 재배는 파종, 비료살포, 비닐 피복 및 비닐 뚫기, 쫑뽑기 등의 관리 작업 및 수확작업을 거치는데 거의 인력에 의존하고 있는 실정이다(Kang et al., 2017). 그 동안 농촌노임상승으로 마늘의 국내 가격은 국제 가격의 2 - 3배에 달해 국제 경쟁력이 낮기 때문에 마늘 재배의 기계화가 절실히 필요하다(Park et al., 2014). 마늘 재배 작업 중 노동력이 가장 많이 투입되는 파종작업은 손으로 1립씩 일일이 파종해야 되기 때문에 소요시간은 26.2 - 33.6시간/10 a에 달하여 전체노동투하시간의 15%를 차지하고 있다(RDA, 1996).
마늘의 파종자세를 바르게 해야 하는 목적은 마늘이 파종 될 시에 눕거나 거꾸로 심어지면 마늘의 성장이 올바르지 못하거나 아예 자라지 않고 흙 속에서 썩어버려 추후 수확 시 생산량이 줄어 경제적으로 피해를 받을 수 있기 때문이다(Hwang et al., 1995; Lee et al., 1997). 하지만 씨마늘의 형상이 특이하기 때문에 마늘을 파종하는 메커니즘을 개발하는데 기구학적으로 많은 변수를 고려해야 하는 어려움이 있다. 하지만 마늘 재배의 기계화가 되지 않으면 생산비 절감은 물론 경쟁력 향상에 한계가 있다.
현재 마늘 파종기 개발을 위한 많은 연구가 수행되고 있다. 하지만 이 연구들의 경우 종자의 배출량과 파종 간격에 중점을 두어 마늘 파종기를 개발한 것이 대부분이었고, 직립 파종을 하고자 하였으나 종자의 자유낙하 방법을 택하였기 때문에 불규칙한 파종 자세에 따른 수확량과 상품성에 많은 차이를 보였다(Hwang et al., 1995; Choi et al., 2008).
과거에 전통 시장 또는 직거래를 통해 마늘을 구매할 때에 저장성을 위해 마늘의 줄기까지 모두 묶어 접 단위로 판매를 하였으나 최근 대부분의 사람들이 가장 많이 이용하는 주변의 편의점이나 마트에서는 소비자의 편의를 위해 줄기 부분을 잘라내고 마늘의 껍질을 모두 벗겨 진공 포장 후 중량 단위로 판매하고 있다. 이렇게 포장된 마늘을 구매하였을 때 내용물의 크기가 모두 일정 할 수는 없지만 간혹 매우 작은 크기의 내용물도 섞여 있다. 마늘의 줄기 부분도 잘렸고 껍질도 벗겨져 있는 경우 저장 기간이 길지 않고 쉽게 물러지거나 곰팡이가 발생하여 꼼꼼하게 관리하지 않으면 다른 내용물에도 병이 옮겨 대부분의 내용물을 사용할 수 없어 버리게 되는 경우도 있다. 판매자 입장에서는 수량 및 무게를 늘려 판매를 해야 경제적인 이익을 마늘이 얻을 수 있지만 구매자 입장에서는 같은 무게 또는 가격이라면 더 좋은 품질의 상품을 구매하고자 한다. 이러한 원초적인 문제를 해결하기 위해서는 마늘이 정상적인 성장을 할 수 있는 조건을 제공할 필요가 있다.
최근 물체 인식, 특징 추출과 같은 응용분야에서 컴퓨터와 vision system을 이용한 영상 데이터 처리 분야가 많이 연구되고 있다(Kim et al. 2001). 마늘처럼 모양이 일정하지 않고 특이한 형상을 갖는 물체의 특정 위치를 정확하게 판별할 수 있다면 효율적인 작업을 기대할 수 있다.
따라서 본 연구에서는 주행형 마늘 직립 파종기 개발을 위한 기초 연구로서 파종 자세에 따른 마늘의 생육 상태를 확인하고 기구학적 요소와 영상 처리를 통한 마늘의 형상을 파악하여 발근부가 항상 아래로 향하도록 공급이 가능한 간이 마늘 직립 파종 장치를 개발하여 마늘의 직립 파종이 가능한지 여부를 파악하고자 하였다.
Materials and Methods
파종 자세에 따른 마늘 성장 분석
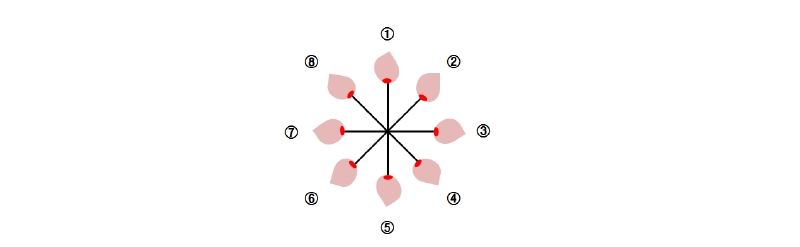
마늘 시험재료는 경상북도 안동지역에서 주로 재배되는 한지형 씨마늘(Seosan, Korea)과 경상남도 진주지역에서 재배되는 난지형 씨마늘(Daeseo, Korea) 각각 200립을 사용하였다. 2015년 11월 중순경 진주시 경상대학교 부속농장에 위치한 비닐하우스에 파종하였다. 시비는 본포를 경운하기 전 유기질 비료(질소 : 인산 : 가리 = 12 : 7 : 9) 뿌리조은 마늘·양파 전용(Dongbu Hannong, Korea) 75 kg/1000 m2를 골고루 살포하고 경운과 정지작업에 의해 비료성분이 토양에 골고루 섞이도록 하고 두둑을 성형한 후 8공비닐을 멀칭하였다. 파종 작업은 1주 후 한지형, 난지형 마늘 각각 200립을 Fig. 1과 같은 파종자세로 구분하여 파종하였다. 그 후, 2016년 5월 초순경 마늘을 수확하여 파종자세에 따른 출현율, 줄기의 휘어진 정도와 같은 성장 상태를 확인하였다. 일반적으로 정상 성장을 한 경우, 줄기는 직선으로 반듯하게 뻗어져 나가며 열매는 크고 단단하다. 난지형, 한지형 마늘 각 200립의 출현율을 확인하고 마늘의 뿌리를 아래 방향으로 내렸을 때를 기준으로 하여 줄기가 휘어진 각도를 측정하였다.
간이 마늘 직립 파종 장치 제작 및 실험
간이 마늘 직립 파종 장치는 크랭크프레스, 마늘 투입부, 마늘 거치부로 구성하였다(Fig. 2). 장치에 활용된 크랭크프레스 원리는 회전 운동을 크랭크와 커넥팅 로드에 의하여 슬라이드 직선 운동으로 변환시키는 것이다. 본 연구에서는 마늘 파종 시 자유낙하식이 아닌 프레스 방식으로서 지면과 약 3 cm정도 거리의 거치부에 고정되어 있는 마늘을 빠른 속도로 지면에 눌러 심는 방식이다. 크랭크프레스 장치는 프로파일을 이용하여 가로 × 세로 × 높이(700 mm × 250 mm × 1100 mm)크기로 제작하여 고정시키고 회전을 시키기 위해서 손잡이를 부착하여 원활하게 회전이 될 수 있도록 제작하였다. 마늘 파종 시에 마늘 투입구를 통해 마늘을 떨어뜨리고 거치부에서 마늘이 고정되면 크랭크프레스 원리를 이용하여 마늘을 심었다.
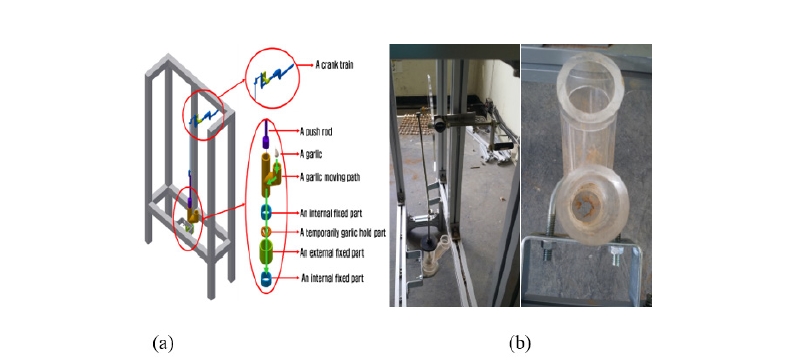
마늘은 아크릴 관으로 자체 제작한 공급 장치를 통해 공급되고 투입구에서 거치부까지 약 45도 각도로 기울어져 있어 마늘이 미끄러져 내려가 발근부가 아래를 향하도록 거치부에 고정된다. 이 거치부에는 Fig. 2와 같이 원형링의 형태에 탄성이 있는 소재로 얇은 날개 형태의 부착물을 제작하여 8방향에 붙였다. 이 날개는 아래 방향으로 향할 수 있도록 각도를 주어 미끄러져 내려온 마늘의 발근부가 수직으로 고정 되는데 도움을 주는 역할을 한다.
경상남도 진주 지역 난지형 마늘 100립과 간이 마늘 직립 파종 장치를 이용하여 3반복 파종 테스트를 하였다.
파종 전 마늘 공급을 위한 영상처리
마늘을 파종 장치에 공급하기 전 발근부가 아래로 향하도록 공급해준다면 직립 파종의 확률을 더욱 높일 수 있을 것이라고 기대하여 영상처리를 통해 특이한 마늘의 형상을 고려하여 정확한 자세를 파악하고자 하였다.
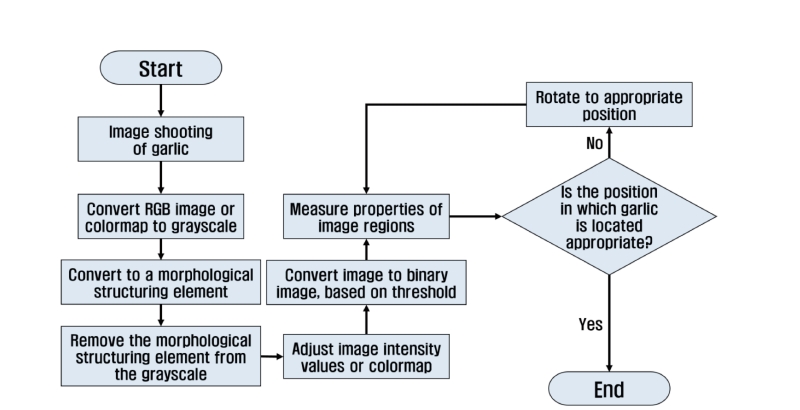
Fig. 3과 같이 상온(temperature: 25℃, humidity: 55%)에서 실내 형광등 조명과 컬러 카메라(PC camera 795, COSY, China)를 이용하여 촬영된 이미지를 PC (NT300E5S-KD14S, Samsung, Korea)로 전송하고 MATLAB (MathWork, USA) 프로그램에서 영상 처리를 실시하였다. 먼저, 마늘의 컬러 이미지를 회색조, 모폴로지 구성 요소로 변환한 다음 이미지 내 마늘을 제외한 배경은 모두 제거한다. 그 후, 영상 명암 값 또는 컬러맵을 입력 영상과 동일한 클래스의 비희소 형식의 2차원 실수 행렬로 반환하고 임계 값을 기준으로 영상을 이진 영상으로 변환한다. 마지막으로 변환된 마늘 객체에 대한 중심을 설정한 뒤 중심으로부터 발근부까지의 각도를 나타내준다. 이를 통해 발근부의 위치를 파악하고 발근부가 우선적으로 공급 될 수 있도록 필요한 만큼 시계 방향 또는 반시계 방향으로 회전시켜 공급함으로써 직립 파종이 될 수 있는 확률이 더욱 커질 수 있다.
Results and Discussion
파종 자세에 따른 한지형, 난지형 마늘의 성장 결과
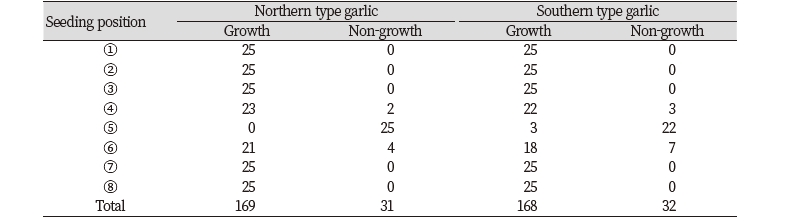
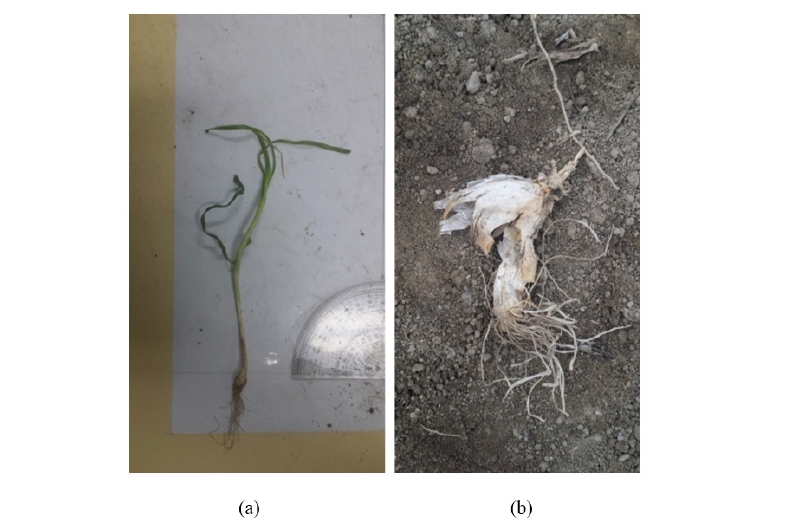
8가지 파종자세로 각각 25립씩 파종하여 재배한 결과 한지형, 난지형 마늘 각각 169, 168립이 생장을 하여 84%의 출현율을 나타냈다. 하지만 출현을 했더라도 Fig. 4와 같이 각 파종 자세에 따른 줄기의 휘어진 정도를 확인할 수 있었다. 파종 자세 중 비교적 발근부가 아래로 향하도록 파종을 한 마늘 같은 경우, 줄기가 곧고 휘어짐 없이 굵고 튼튼하게 뻗어나가며 열매 또한 굵은 것을 확인 할 수 있는 반면 마늘이 세워진 상태가 아닌 누워져 있거나 뒤집혀 파종된 마늘을 보면 상대적으로 줄기가 얇고 힘 없이 자란 것을 볼 수 있다. 또한 열매의 크기도 정상적인 파종 자세로 자란 마늘의 열매에 비해 작은 것을 확인 할 수 있다.
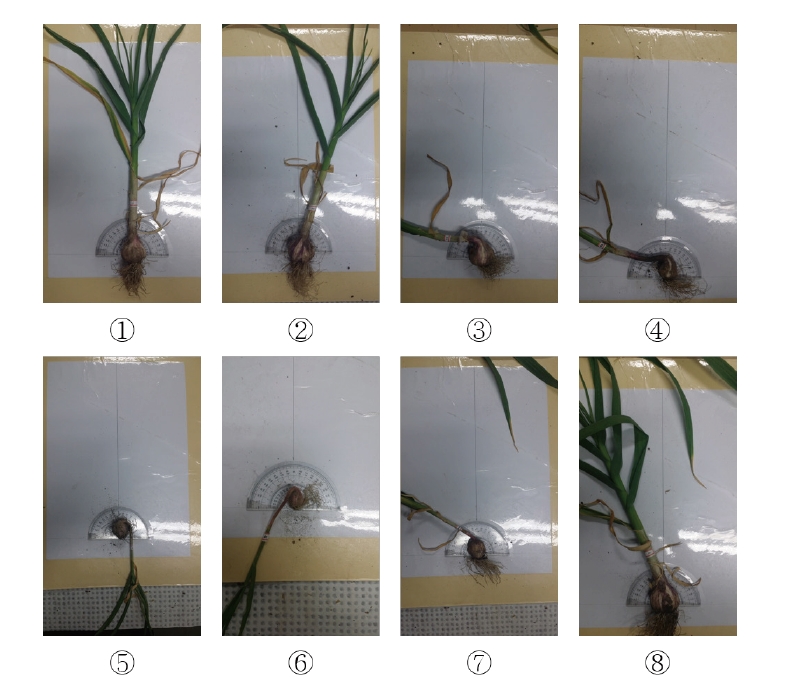
Table 1과 같이 두 종류의 마늘을 이용해 파종 자세에 따른 성장 정도를 확인 하였을 때 Fig. 1의 1, 2, 3, 7, 8번 파종 자세로 파종되었을 때는 줄기의 약간 휘어짐 정도는 있지만 비교적 정상적인 성장을 하였지만 4, 5, 6번 파종 자세로 파종되었을 때는 같은 기간 동안 성장이 매우 더디거나 심지어 흙 속에서 썩어버리는 경우도 발생했다(Fig. 5). 이렇게 마늘의 파종 자세는 생산량과 상품성에 영향을 미칠 수 있는 부분이기 때문에 마늘 파종기 개발에 있어서 직립 파종은 반드시 필요한 요소이다.
간이 마늘 직립 파종 장치 실험 결과
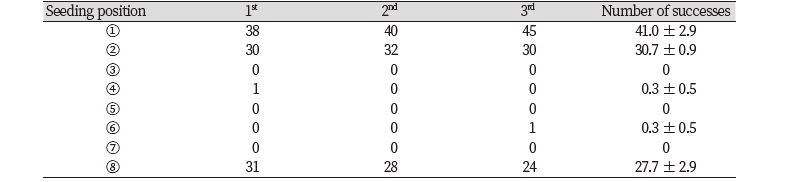
결과는 Table 2와 같다. 1차 실험결과 100립 중 40립, 2차에서는 100립 중 45립, 그리고 3차에서는 100립 중 38립이 직립으로 파종되어 평균 41립이 완전 직립 파종되었다. Fig. 1의 2, 8번 파종 자세와 같이 비스듬하게 기운 파종 결과는 전체 평균 58.4립이었다. 3 - 7번과 같은 파종 자세로 파종된 결과는 평균 0.6립이었다. 가장 이상적인 완전 직립 파종은 41%에 불과하였으나 직립과 유사한 2, 8번 파종률까지 합한다면 99.4% 수준으로 파종되었음을 알 수 있었다. 현재 많이 사용하고 있는 마늘 파종기의 파종 원리는 대부분 자유낙하식으로 낙하되는 거리가 길어 파종 되었을 때 마늘의 파종 자세를 예측할 수 없다. 하지만 본 연구를 통해 개발된 간이 마늘 파종 장치를 이용했을 때 Fig. 6과 같이 1, 2, 8번 파종 자세와 같이 안정적으로 파종되었으며 앞 절의 결과에서 확인 할 수 있었듯이 정상적인 성장을 기대 할 수 있다. 결과적으로 기존의 마늘 파종기를 사용했을 때 보다 좀 더 마늘 재배에 있어 좋은 성장 조건을 제공할 수 있고 이를 통해 생산량 증가와 고품질의 마늘 수확을 기대할 수 있을 것으로 판단된다.

영상처리를 이용한 공급 전 마늘 자세 분석
영상처리를 한 결과 Fig. 7과 같이 나타났다. 크기나 모양이 다른 총 100개의 마늘을 촬영하여 영상처리 한 결과 81%에 해당하는 81개의 마늘이 정상적으로 인식되었다. 인식되지 못한 마늘의 경우에는 마늘을 파종하기 위해 쪽 분리 작업 시 껍질이 매끈하게 분리되지 않은 부분이 같이 촬영되거나 검은 배경에 반사된 빛을 마늘로 인식하여 실제 마늘을 인식하지 못하였다. 그리고 마늘의 모양이 거의 구 형태에 가까운 경우 뿌리 부분을 인식하지 못하는 현상이 발생하였다. 마늘의 전처리, 모양, 크기 그리고 촬영 조명 밝기 등과 같이 노이즈가 발생할 수 있는 요소들을 확인하여 제거해줌으로써 보다 정확한 마늘의 자세를 파악할 수 있을 것으로 생각된다.
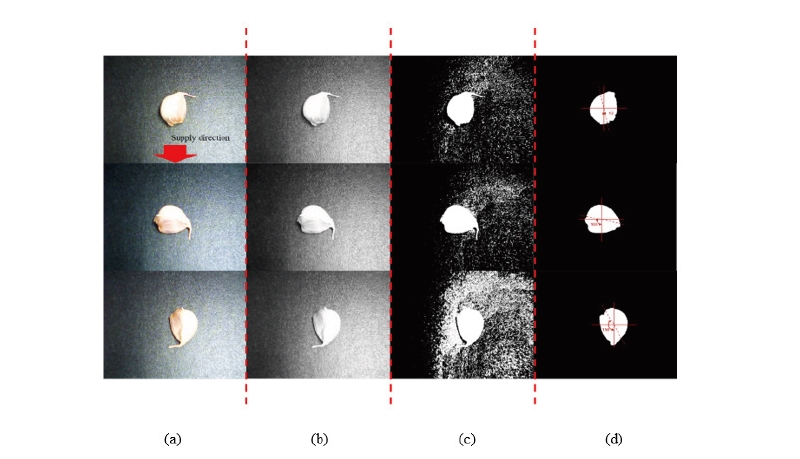
Fig. 7. Analysis of garlic position using image processing (a) Red, Green, Blue (RGB) image of garlic and red arrow indicates supply direction of garlic, (b) Converted RGB image to grayscale, (c) Removed the morphological structuring element from the grayscale, and (d) Converted (c) image to binary image and measured the angle of the roots based on the garlic supply direction
Conclusion
본 연구는 주행형 마늘 직립 파종기 개발을 위한 기초 연구로서 마늘 파종 자세에 따라 재배 및 수확한 결과를 통해 마늘의 성장 수준을 파악하고 상품성까지 고려했을 때 직립 파종이 필요하다는 사실을 알 수 있었다. 또한 간이 마늘 파종 장치를 이용하여 파종 시험을 하였을 때 완전 직립 파종은 약 41% 정도 가능했고 완전 직립은 아니지만 직립에 가까운 파종 자세로 약 58.4% 파종되었다. 이 경우에도 앞의 실험 결과를 통해 마늘의 정상적인 성장을 기대할 수 있다. 그러나 장치의 마늘 임시 고정부의 부품이 매우 얇고 매우 빠른 속도로 마늘을 파종하는 축이 왕복 운동하기 때문에 내구성 문제로 인한 잦은 부품 교체가 불가피하다면 오히려 작업에 차질이 생길 수 있다. 그렇기 때문에 해당 부품에 대한 보완이 필요하다. 직립 파종의 확률을 높이기 위해 파종 장치에 마늘을 공급 전 4단계의 영상처리를 통해 81%의 확률로 마늘의 발근부 위치를 파악하였다. 이 결과를 바탕으로 공급 방향에 맞게끔 회전시켜 발근부를 항상 아래로 향하도록 공급하여 직립 파종의 확률을 높일 수 있을 것으로 기대된다. 추후, 본 연구에서 이용한 간이 마늘 파종 장치 고정부에서 마늘의 파종 자세를 좀 더 직립으로 유지하면서 내구성을 보완할 수 있는 소재 및 구조를 개선하고 마늘을 파종 장치에 공급 전 영상처리 시 노이즈 발생을 최소화시켜 자세 분석의 정확성을 높이는 등의 문제점을 해결하고자 한다. 또한 국내에서 재배되는 마늘의 품종에 따른 크기, 무게 등과 같은 조건들을 고려한 범용적인 주행형 직립 마늘 파종기를 개발하고자 한다.

