
Introduction
전 세계적으로 사용자의 편의성을 확보하고 운전 조작 개입을 최소화하기 위하여 차량의 자율주행 기술에 대한 관심이 지속적으로 높아지고 있다(Kim et al., 2021a). 자율주행 기술은 효율성이 높을 뿐만 아니라 운전자의 피로, 질병 등으로 인한 주의가 필요할 때 주행의 주요 기능을 담당함으로써 안전성을 확보할 수 있다는 이점이 있다(Fagnant and Kockelman, 2015). 이러한 자율주행 기술은 4차 산업혁명에 따라 인공지능, 빅데이터, 사물 인터넷, 고성능 센서 등과 같은 요소기술들의 개발 가속화로 인해 더욱 빠르게 개발되고 있다(An and Park, 2018; Kim et al., 2020b). 자율주행 기술은 보급 대수가 가장 많고 산업 규모가 큰 자동차 분야에 활발히 적용되어 왔으며(Han et al., 2019a), 최근 자동차뿐만 아니라 건설기계 및 농업기계 등 다양한 산업분야에 확대되어 적용 중이다(Jeong and Cho, 2020; Kim et al., 2020a).
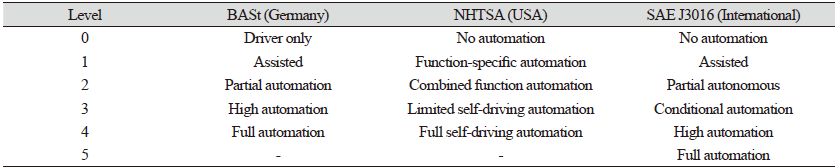
자율주행 기술이란 직접적인 수동 물리적 제어 또는 운전자의 감시 없이도 차량이 주행할 수 있도록 하는 기술을 의미하며, 자율주행 차량은 특정 자율주행 기술 레벨을 갖춘 차량을 의미한다(Lee et al., 2021). 자율주행 차량의 성능 및 안전 등을 평가하기 위해서는 차량에 장착된 자율주행시스템의 기술 수준을 동일한 지표를 통해 평가해야 하며, 이때 필요한 것이 자율주행 기술 레벨이다. 자동차 분야의 자율주행 기술의 레벨은 2013년 5월 미국 도로교통안전국(National Highway Traffic Safety Administration, NHTSA)에서 처음 제시하였으며, 기술 레벨을 0부터 4까지 5단계로 구분하였다(NHTSA, 2013). NHTSA가 자율주행 기술 레벨을 제안할 당시에는 자율주행 기술이 구체적이지 않았으므로, 이를 보완하기 위하여 2016년 9월 국제자동차기술자협회(Society of Automotive Engineers International, SAE International)는 자율주행 표준 ‘SAE J3016’에서 Level 0은 비자동화, Level 1은 운전자지원, Level 2는 부분 자율주행, Level 3은 조건부 자율주행, Level 4는 고도 자율주행, Level 5는 완전 자율주행으로 자동차 분야의 자율주행 레벨을 0부터 5까지 6단계로 세분화하였다(SAE International, 2018). SAE에서 제안한 자율주행 레벨은 현재 미국 교통부(Department of Transportation, DoT) 및 UN (United Nations) 산하 자동차 안전기준 국제조직포럼(UN/ECE/WP.29)의 자율주행자동차 전문가그룹과 세계자동차공업협회(International Organization of Automobile Manufacturers, OICA)에서도 공식적으로 채택하여 사용하고 있어 전 세계적으로 SAE 기준인 6단계 레벨 구분으로 통일하는 추세를 보이고 있다(Kim, 2018). 독일은 연방도로교통청(Bundesanstalt für Straßenwesen, BASt)은 자율주행시스템에 대하여 자율주행 기술 정도에 따라 운전자의 주행, 주행보조, 일부자동화, 고도자동화, 완전자동화의 5단계로 구분하고 있다. 독일 BASt의 자율주행 기술 분류는 SAE 자율주행기술과 그 구별단계에서 용어상의 차이가 나타날 뿐 대부분 유사한 것을 알 수 있다. Table 1은 주요 기관에서 제안한 자율주행 기술 레벨에 따른 기술 분류이다.
Table 1. Data information used in study.
|
|
BASt, Federal Highway Research Institute; NHTSA, National Highway Traffic Safety Administration; SAE J3016, Society of Automotive Engineers J3016. |
해외 농업기계 자율주행 기술은 작물 감지(Blanquart et al., 2020), 장애물 감지(Stentz et al., 2002; Christiansen et al., 2016; Li et al., 2020), 경로 검출(Kise et al., 2005; Tian et al., 2014; Teng et al., 2016), 경로 추종(Fang et al., 2006; Mohareri et al., 2012), 속도 제어(Kayacan et al., 2015), 다수의 농업기계 협업이 가능한 군집제어(Noguchi et al., 2004; Zhang et al., 2016) 등에 대하여 활발히 연구가 수행되었고, 현재는 기존에 개발된 자율주행 기술의 고도화를 위한 연구가 많이 수행되고 있다. 특히, 북유럽 및 북미 지역에서는 자율주행을 위한 경로 안내(navigation-assist) 및 자동 조향(auto-steering) 제품이 이미 보급되어 활발히 사용 중이며, 세계 최고 기술을 보유하고 있는 미국 존디어사(JohnDeere)의 경우 작업기 제어까지 가능한 수준의 자율주행 기술까지 상용화를 진행하고 있다. 반면에, 국내 자율주행 농업기계 기술은 자동조향 수준으로 국내 제조사에서는 자동조향 기술을 탑재한 트랙터, 이앙기 등 일부 농업기계를 출시하고 있으나 아직까지 해외 선진사 대비 실용화 정도는 낮은 상태를 보이고 있다(Kim and Kim, 2018). 현재 국내 농업기계 자율주행관련 연구는 대부분 경로 계획(Song et al., 2015), 작업 환경 인식(Baek et al., 2020; Kim et al., 2021c), 경로 검출 및 생성(Lyu et al., 2018; Kim et al., 2020b; 2021b), 경로 추종(Han et al., 2015; 2019c; Jeon et al., 2021), 장애물 감지(Song et al., 2020), 작업기 제어(Han et al., 2019b)와 같은 연구들이 활발히 진행되고 있다. 농업기계 분야에 자율주행 기술을 적용하고 기술 수준을 정확하게 평가하기 위해서는 자동차 분야의 자율주행 레벨과 같은 농업기계 분야만의 자율주행 기술 레벨에 대한 정의가 필요하다. 하지만, 아직까지 자율주행 농업기계 레벨에 대한 표준 및 규격 등은 국내뿐만 아니라 국제적으로도 제정되어 있지 않으며, 현재 농업기계 자율주행 기술 레벨에 대하여 국가별, 제조사별 기준이 각기 다른 수준을 정의하고 있다. 따라서, 농업기계분야의 보다 명확하고 통일된 자율주행 기술 수준에 대한 분류를 위하여 표준화된 기술 레벨 정의가 필요한 실정이다.
본 연구는 농업기계의 자율주행 기술 수준과 농경지 내에서 수행되는 주요 농작업에 필요한 항목별 제어 주체에 따른 자율주행 기술 레벨을 제안하기 위하여 수행되었다. 본 연구에서는 자율주행 기술에 대하여 연구가 가장 활발히 수행되고 있는 자동차 분야의 자율주행 기술 레벨(SAE International J3016)을 기반으로 농업기계 실정에 적합하도록 수정하여 농업기계 자율주행 레벨을 제안하고자 하였다.
Materials and Methods
도로 차량 주행 자동화 기술의 레벨 분류
SAE International에서 제시한 J3016은 도로 차량 주행 자동화 시스템의 용어 분류체계와 정의(taxonomy and definitions for terms related to driving automation systems for on-road motor vehicles)로서, 동적 주행 작업(dynamic driving task, DDT)의 일부 또는 전부를 수행하는 자동차의 주행 자동화 시스템을 다루고 있다(SAE International, 2018). 이 표준은 자동차의 주행 자동화가 없는 단계(Level 0)에서부터 전체 주행 자동화 단계(Level 5)까지 총 6개의 레벨에 대한 기술 정의를 포함하는 분류 체계를 제공한다.
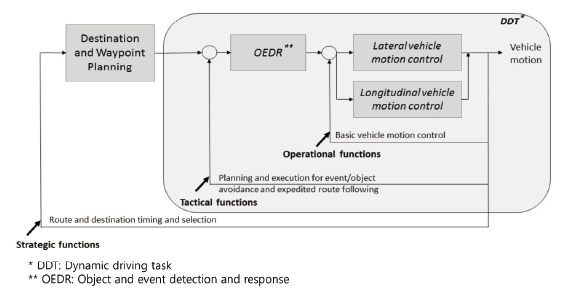
Fig. 1은 자동차 분야의 DDT를 나타내는 주행 작업에 대한 개략도이다. DDT는 도로에서 차량의 운행에 필요한 모든 실시간 작동 기능을 포함하며, 스티어링을 통한 횡방향 차량 움직임 제어, 가속과 감속을 통한 종방향 차량 움직임 제어, 사물과 사고 감지, 인식, 분류 및 대응 준비를 통해 주행 환경 모니터링, 사물과 사고 대응 실행, 기동 계획, 조명, 신호, 움직임 등에 대한 선명도 개선에 대한 주요 사항 등을 다룬다.
DDT 수행 목적을 위하여 Level 1은 횡방향 차량 움직임 제어(lateral vehicle motion control) 또는 종방향 차량 움직임 제어(longitudinal vehicle motion control) 및 기본 차량 움직임 제어(basic vehicle motion control)와 관련된 제한된 사물 및 사건 감지 대응(object and event detection and response, OEDR) 일부의 자동화를 다룬다. Level 2는 횡·종방향 차량 움직임 제어와 기본 차량 움직임 제어와 관련된 제한된 OEDR의 자동화를 다룬다(Noble et al., 2021). Level 3에서부터 5까지는 횡과 종 차량 움직임 제어와 전체 OEDR의 자동화를 다룬다.
농업기계의 자율작업 시스템
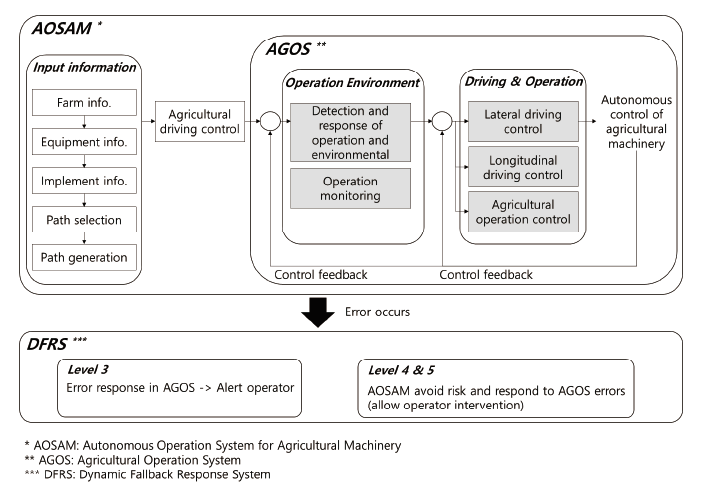
농업기계는 자동차와 달리 농작업을 수행하는 차량으로서 차량(농기계) 정보 외에 농경지 정보, 부착 작업기 정보, 농작업 특성 등 다양한 정보를 가지고 있다(Lee et al., 2016). 농업기계의 자율주행 레벨을 정의하기 위해서는 이러한 농업기계의 특수성을 반드시 고려해야 한다. 따라서 본 연구에서는 자동차 분야의 J3016의 DDT (Fig. 1)를 기반으로 농업기계의 특수성을 고려하여, 농업용 자율작업 시스템(autonomous operation system for agricultural machinery, AOSAM) 및 동적 오류 대응 시스템(dynamic fallback response system, DFRS)을 Fig. 2와 같이 제안하였다. AOSAM은 사전에 작업자가 정보를 입력하는 파트(input information)와 이에 대한 정보를 받아 농작업 주행 제어를 수행하는 농작업 시스템(agricultural operation system, AGOS) 파트를 포함한다. AOSAM은 농경지에서 트랙터, 콤바인과 같은 농업기계가 지속적으로 주행 및 농작업을 자동으로 수행할 수 있도록 지원하는 하드웨어와 소프트웨어를 포함하는 전체 시스템을 의미한다. 이때, AOSAM에서 AGOS는 농지에서 자율주행 농업기계를 작동하는데 필요한 주요 제어장치 및 기능을 포함하며, 주요 기능은 가속/감속을 통한 종방향 제어, 조향(운행)을 통한 횡방향 제어, 농작업을 위한 작업기 제어(예: 트랙터의 power-take off (PTO), 3점 링크, 유압 제어), 농경지 작업 환경 감지 및 대응에 대한 제어, 작업 모니터링 제어이다.
사전 입력정보
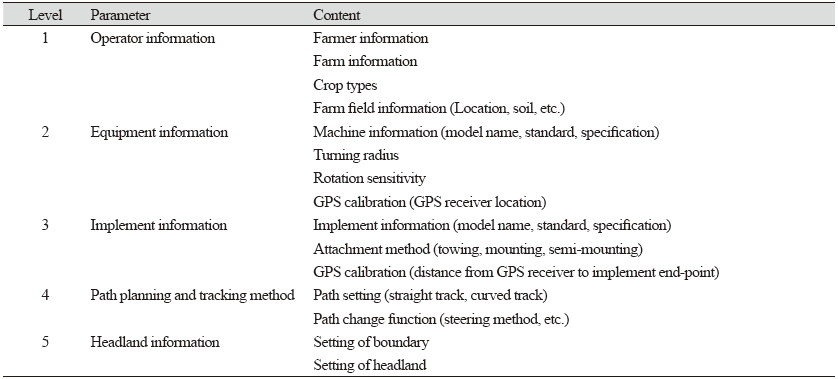
농업기계 자율주행 구현을 위하여 사용자는 AOSAM에서 사전 입력정보를 설정해야하며, 자율주행 기술 레벨별 입력 항목의 예시는 Table 2와 같다. 작업 경로(path of operation)는 농경지 내에서 농작업의 시작점에서 끝지점까지 운전자 또는 시스템이 설정(의도)한 대로 농업기계가 주행하는 전체 농작업 주행 경로를 의미한다. 이때, 작업 경로는 내부 왕복 작업 경로와 다음 왕복 작업 열 진입을 위한 새머리 선회 구간을 포함하며, 농지 환경과 작업 종류에 따라 외부 회경 작업 경로도 포함할 수 있다.
농작업 시스템
AGOS는 작업 모니터링, 작업과 환경의 감지 및 대응(detection and response of operation and environmental, DROE)과 같은 작업 및 환경 제어 파트와 종방향 구동·횡방향 구동·농작업 제어와 같은 주행 및 농작업 기본 제어 파트로 구분할 수 있다. 이때, 농업기계 자율주행 컨트롤 기능을 통해 작업 및 환경 제어와 주행 및 농작업 기본 제어 파트에 컨트롤 피드백 지령을 전송한다.
작업 및 환경 제어
작업 및 환경 제어는 작업모니터링, 작업 및 환경의 감지와 대응으로 구분하였다. 작업모니터링은 AOSAM에서 운전자 또는 시스템이 의도한 명령이 올바로 작동 수행되는지 여부를 판단하는 감시장치로서 운전자 모니터링, 작업환경 모니터링, 작동 성능 모니터링, AOSAM 모니터링을 포함한다. 운전자 모니터링(operator’s monitoring)은 운전자가 자신이 의도한 활동에 대해 시스템이 역할을 수행하고 있는지 확인하기 위한 감시 활동이며, 작업 환경 모니터링(operational environment monitoring)은 농업기계 운행에 필요한 실시간 농경지 주변 환경상황에 대한 대응 준비를 수행하는 활동이다. 작동성능 모니터링(vehicle performance monitoring)은 농업기계가 수행하는 농작업이 운전자가 의도한 대로 수행되는지 판단하기 위한 활동이며, AOSAM 성능 모니터링은 AOSAM이 AGOS의 일부 또는 전부를 적절하게 수행하고 있는지 평가하기 위한 감시 활동을 의미한다. DROE는 AGOS의 일부로 주행 및 농작업 기본 제어를 통한 작업상태에서 주변 환경상황을 모니터링하고 이를 통해 적절한 응답을 통해 대응한다.
주행 및 농작업 기본 제어
주행 및 농작업 기본 제어를 위해서는 종방향 구동 제어와 횡방향 구동 제어 그리고 농작업 제어가 요구된다. 종방향 구동 제어(longitudinal motion control)는 농업기계가 직진구간을 추종하기 위한 X축 방향(종방향)으로 제어하는 모든 구성품을 실시간 지속적으로 조절하는 데 필요한 제어장치이다. 횡방향 구동 제어(lateral motion control)는 선회구간을 추종하기 위한 Y축 방향(횡방향)으로 제어하는 모든 구성품을 실시간 지속적으로 조절하는 데 필요한 제어장치이다. 이때, 농작업 제어는 작업경로의 장애물 감지, 설정된 속도, 작업 부하에 따라 가속 또는 제동을 수행한다.
동적 오류 대응 시스템
DFRS는 AGOS 관련 시스템 고장이 발생할 경우, 최소한의 위험 조건에 대응할 수 있는 운전자 또는 AGOS의 응답을 의미한다. 자율주행 Level 3에서 AGOS를 수행하는 시스템이 AGOS 오류대응을 수행할 수 없을 때는 운전자에게 경고음을 보내며, 운전자가 개입하기 전까지는 AGOS는 계속 제어를 수행하여야 한다. Level 4와 5에서 AOSAM는 최소 위험상태를 회피하고 AGOS 오류대응을 수행할 수 있어야 하며, 운전자 선택에 따라 운전 및 위급상황에서 직접 제어할 수 있어야 한다.
적용 범위
본 연구에서 제안하는 농업기계 자율주행 레벨은 농경지(논과 밭 등)에서 작업을 수행하는 자율주행시스템이 장착된 자주식 농업기계를 대상으로 하며, 자율주행 레벨은 기술 수준과 사용자의 개입의 정도에 따라 Level 0부터 5까지의 단계로 정의하였다.
Results and Discussion
자율주행 레벨 분류
농업기계 자율주행 레벨 분류 체계의 핵심은 운전자와 AOSAM의 상대적 역할을 기반으로 한다. AOSAM의 기술 수준은 농업기계를 운용하는 운전자의 역할을 변화시키며, 농업기계 자율주행 레벨 분류는 AOSAM의 기술 성숙도에 따라 구분하였다. AOSAM이 AGOS의 지속적인 직진 또는 선회 움직임 제어를 수행하는 경우 운전자를 보조할 수 있다(Level 1 and 2). AOSAM이 전체 AGOS를 수행하는 경우, 시스템 고장이 발생했을 때는 운전자에게 제어권을 전달할 수 있도록 경고음을 알리고, 운전자는 농업기계를 제어한다(Level 3). AOSAM이 AGOS 오류대응을 수행할 수 있는 경우, 농업기계는 시스템이 제어한다(Level 4 and 5). 농업기계 자율주행 기술 레벨은 직진·선회, 경로 및 작업, 작업 및 환경 인식, 오류 대응, 농지 설정과 같은 기능에 대한 주체(농업기계 또는 사람)에 따라 Fig. 3과 같이 분류하였다.
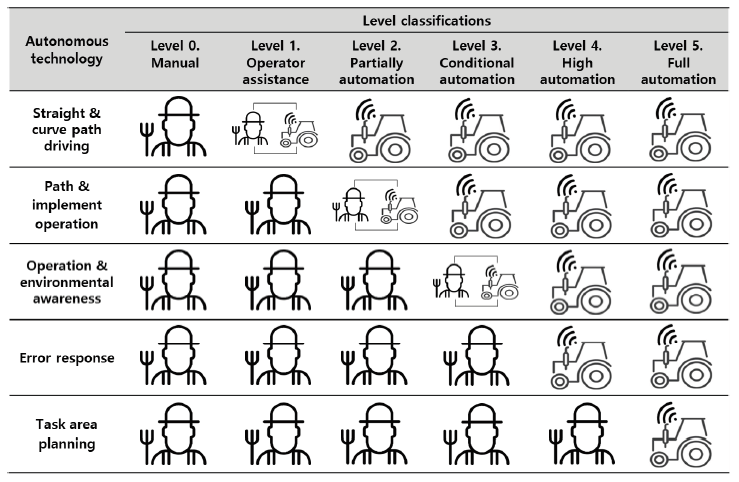
Level 0은 자동화되지 않은 상태로 관행적인 사람에 의한 농작업을 의미하며 농업기계 운전자가 모든 제어의 주체가 된다. Level 1은 자율주행 기술이 운전자보조의 역할 정도로 사용되며, 운전자가 설정한 직진 경로를 농업기계가 자동으로 추종하며 농작업을 수행하는 수준이다. 단, 새머리 선회 구간은 작업자가 직접 제어를 해야 한다.
Level 2는 부분 자동화(자율주행 및 농작업)의 수준을 의미하며, AOSAM이 농경지 일부 구간의 작업 경로를 생성 및 추종할 수 있으며, 작업기 제어 명령을 수행하여 새머리 선회를 자동으로 수행할 수 있는 수준을 말한다. 이때, 농작업 상태와 주변 환경 인지 및 대응은 운전자가 수행해야 한다. Level 3은 조건부 자율주행 및 농작업이 가능한 기술 수준으로 작업자가 사전 설정한 농지 정보를 기반으로 자율주행 농업기계가 선회를 포함한 전체 작업 경로를 주행할 뿐만 아니라, 작업기 작동 명령을 자동으로 설정하고 작업을 수행하는 기술 수준을 의미한다. 이때, 농작업 상태와 주변 환경 인식은 사용자가 아닌 시스템이 수행하지만 차량 및 농업용 자율주행시스템의 결함 및 농작업 상태 불량 시에는 운전자가 대응하도록 한다. Level 4는 고도 자율주행 농작업이 가능한 상태로서, 작업자가 사전 설정한 농지 정보를 기반으로 자율주행 농업기계가 농경지 진·출입 경로를 포함한 전 영역 경지의 작업 경로와 작업기 작동 명령을 자동으로 설정하고 작업을 수행할 수 있는 단계를 의미한다. 이때, 시스템은 농작업 상태와 주변 환경에 대한 능동적 대응과 함께 차량 및 AOSAM 결함 시에도 대응할 수 있어야 한다. Level 5는 농업기계 완전 자율주행이 가능한 상태로 농지 영역 설정, 경로 및 작업계획을 농업기계가 자동으로 수립하므로 작업자를 필요로 하지 않으며, 농지 내 모든 농작업을 시스템이 주체적으로 수행하는 것을 의미한다.
농업기계 자율주행 레벨 분류에 따른 평가 기준
농업기계 자율주행 레벨을 충족하는지 판단하기 위해서는 레벨별 평가 기준이 요구된다. 본 연구에서는 농업기계 자율주행 기술의 레벨 분류에 따른 평가 기준을 수립하였다. Level 0은 작업자의 수작업으로 자동화가 되어 있지 않으므로 평가 기준 대상에서 제외하였다. Level 1은 AOSAM이 장착된 농업기계가 직진 또는 곡선의 단방향 주행제어를 수행하는지 여부에 따라 평가를 수행한다. Level 2는 AOSAM이 장착된 농업기계가 직진과 선회 움직임 제어를 동시에 수행하는지 여부에 따라 평가를 수행하며, Level 3은 AOSAM이 장착된 농업기계가 작업환경 감지 및 농작업 모니터링을 수행하는지 여부에 따라 평가한다. Level 4는 장착된 농업기계가 작업환경 감지 및 농작업 모니터링에 대한 대응과 차량 및 AGOS 오류대응을 수행하는지 여부에 따라 평가하며, Level 5는 AOSAM이 장착된 농업기계가 사전 설정 및 계획을 자동으로 수행하는지 여부에 따라 평가를 수행한다. 이러한 평가 기준은 자율주행 기능을 갖는 농업기계의 보다 정확한 기술 수준을 분류하기 위해 사용될 수 있다.
Conclusion
본 연구는 트랙터, 콤바인, 이앙기 등을 포함하는 농업기계 분야의 자율주행 기술에 대한 레벨을 정의하고 분류하기 위하여 수행되었으며, 주요 결과는 다음과 같다.
본 연구에서는 자율주행 기술에 대하여 연구가 가장 활발히 수행되고 있는 자동차 분야의 자율주행 기술 레벨(SAE International J3016)을 기반으로 농업기계 실정에 적합하도록 수정하여 농업기계 자율주행 레벨을 분류하였다. 농업기계 자율주행 레벨은 직진·선회, 경로 및 작업, 작업 및 환경 인식, 오류 대응, 농지 설정 등과 같은 주요 농작업에 필요한 항목별 제어 주체에 따라 0 (비자동화)부터 5 (완전 자동화)까지 6단계로 분류되며, 분류 체계의 핵심은 운전자와 AOSAM의 상대적 역할을 기반으로 한다. Level 0은 자동화되지 않은 상태로 관행적인 사람에 의한 농작업을 의미한다. Level 1은 자율주행 기술이 운전자보조의 역할 정도로 사용되며, 직진 경로 추종 정도의 기능을 포함한다. Level 2는 부분 자동화의 수준을 의미하며, AOSAM이 농경지 일부 구간의 작업 경로를 생성 및 추종할 수 있으며, 직진 및 선회 구간 자동 작업이 가능한 수준이다. Level 3은 조건부 자율주행이 가능한 수준으로 작업자가 사전에 설정한 농지 정보를 기반으로 선회를 포함한 전체 작업 경로를 주행할 수 있을 뿐만 아니라, 작업기 작동 명령을 자동으로 설정하고 작업을 수행하는 기술 수준이다. Level 4는 고도 자율주행 농작업이 가능한 상태로 사전에 설정한 농지 정보를 기반으로 농업기계가 전 영역 농경지의 작업 경로와 작업기 작동 명령을 자동으로 설정하고 작업을 할 수 있다. Level 5는 농업기계 완전 자율주행이 가능한 상태로 농지 내 모든 농작업을 AOSAM이 주체적으로 수행하며 작업자를 필요로 하지 않는다.
현재 농업기계 분야에서는 국내뿐만 아니라, 국제적으로도 자율주행 농업기계 기술 레벨과 같은 표준은 제정되어 있지 않다. 기존에는 자율주행 농업기계 기술 레벨에 대하여 표준화된 정의 없이 국가별, 제조사별 각기 다른 기준을 적용해오고 있으며, 이는 농업기계 자율주행 기술에 대한 명확한 정의 및 정확한 평가를 어렵게 한다. 본 연구에서 제안한 자율주행 농업기계 기술 레벨은 이러한 농업기계 분야의 자율주행 기술 레벨의 부재로 인해 발생할 수 있는 문제를 해결하는데 기여할 수 있을 것으로 기대된다. 또한, 자율주행 기술 레벨은 농업기계뿐만 아니라 농업기계와 유사한 비도로 작업 차량인 건설기계 분야에서도 아직까지 명확하게 정의 및 분류되지 않았으므로, 본 연구의 결과는 향후 건설기계 분야에서도 활용할 수 있을 것으로 기대된다.
본 연구에서 제안된 농업기계용 자율주행 레벨은 자동차 분야의 기술 레벨을 기반으로 되어있으므로, 주로 농업기계의 주행 및 견인 작업을 중점적으로 고려하여 제안되었다. 하지만, 농업기계는 주행 및 견인 작업 외에 수확 작업 등 다양한 농작업을 수행하므로, 작물 인식 및 농작업 구현을 위한 작업기 제어 등의 고려가 필요하다. 이러한 한계는 우선적으로 농작업 사용비율이 높은 주행 및 견인 작업 위주의 자율주행 레벨을 운용함에 따라 발생하는 문제점 등을 통해 개선점을 도출하여 향후 보완될 수 있을 것으로 판단된다.

