
Introduction
다목적 관리기는 로터리, 구굴, 배토 등의 다양한 농작업을 수행하는 농업기계이며, 특히 협소한 토지, 온실 등과 같이 기존 농업기계의 활용이 제한되는 환경에서 주로 사용된다. 국내 다목적 관리기의 공급대수는 2018년 기준 전년도 대비 약 80% 증가한 621대로 조사되었으며(KAMICO and KSAM, 2019), 고령화에 의해 편의성이 높은 소형 농기계에 대한 수요 증가에 따라 시장 규모 또한 지속적으로 증가할 것으로 전망된다(Kang et al., 2013).
최근에는 탄소량의 배출 및 흡수량을 동일하게 하여 순배출이 0에 수렴하도록 하는 탄소중립의 필요성과 농업기계의 유류 사용량의 증가에 따른 환경 오염 문제의 심각성이 대두되고 있다(Lee et al., 2016). 이에 따라, 농업기계 분야에서는 기존 내연기관을 대체 가능한 친환경 동력전달시스템에 관한 연구가 활발히 진행되고 있다(Park and Kim, 2014; Kim et al., 2019; Lombardi and Berni, 2021). 특히, 다목적 관리기는 약 5 kW의 낮은 마력대의 엔진을 사용하기 때문에 작은 용량의 모터와 배터리를 활용한 전동화가 용이하다. 다목적 관리기의 전동화는 낮은 속도에서의 고토크 출력, 무단 변속, 그리고 CO2 배출량 감소를 통한 친환경 농작업 수행과 같은 이점을 가진다. 전기구동 기술에 관한 연구는 자동차 및 특수 목적 차량 분야에서는 활발히 진행되고 있으나, 농업기계 분야에서의 관련 연구는 농작업 특성상 부하를 고려한 구동부를 설계 및 평가해야 하는 어려움이 있어 아직까지는 부족한 실정이다(Kim and Park, 2012). 전기구동 기술을 적용한 다목적 관리기 설계 시 모터 선정을 위해 농작업 시 작용하는 부하 분석이 필수적이며, 개발 이후에는 실차 시험을 통한 농작업 성능 평가가 필수적이다. 하지만 기존 다목적 관리기의 설계는 대부분 경험적 방법에 의존하고 있으며, 실차 시험 시 많은 비용과 시간이 소요되는 단점이 있다. 이를 해결하기 위해 최근 농업기계 분야에서는 시뮬레이션 소프트웨어를 활용하고 있으며(Ahn et al., 2019; Baek et al., 2020a), 실제 작업과 유사한 조건에서의 시뮬레이션 해석을 통해 부품 설계 및 성능 평가에 활용되고 있다.
Liu 등(2016)은 전기 트랙터에 적용되는 모터 시스템의 모델링 및 시뮬레이션을 수행하였으며, 전기 트랙터의 핵심 부품에 대한 제어 전략 및 설계 가이드라인을 제시하였다. Chen 등(2019)은 MATLAB/Simulink (MathWorks, California, USA)를 활용한 시뮬레이션 모델을 통해 전기 트랙터의 파워트레인 최적화 설계 방법을 제시하였으며, 견인성능 향상 결과를 도출하였다. Baek 등(2020b)은 상용 소프트웨어 Simulation X (Ver. 4.0, ESI ITI GmbH, Dresden, Germany)를 통해 대형 마력급 전기구동 AWD (all wheel drive) 트랙터의 시뮬레이션 모델을 개발하였으며, 부하 데이터를 통해 모델을 검증하는 연구를 수행하였다. Lagnelöv 등(2021)은 시뮬레이션을 통해 배터리의 최적 용량을 제시하였으며, 전기 트랙터에 적용되는 배터리의 경제적인 선정 방법을 제시하였다.
문헌 연구 결과, 시뮬레이션은 주로 전기 구동 트랙터와 같은 대형 농업기계의 시스템 최적 설계 및 검증에 활용되고 있으며, 아직까지 소형 농업기계의 전동화에 대한 연구는 미비한 실정이다. 특히, 다목적 관리기는 장착된 작업기에 따라 중경 제초, 운반 등의 작업 수행이 가능하여, 다양한 소형 농업기계의 전동화 관련 연구에 활용 가능하다. 따라서, 본 연구는 다목적 관리기의 전동화를 위한 기초 연구로써, 1) 기존 엔진 구동형 다목적 관리기에 부하계측 시스템을 구성하여 농작업 중 가장 높은 부하를 필요로 하는 로터리 작업 시 토크 데이터를 계측하고, 2) 계측된 데이터를 통해 부하 사이클을 개발하여 전기구동 다목적 관리기 모델의 시뮬레이션 조건으로 해석을 수행하고, 3) 해석 결과 분석을 통한 전기구동 다목적 관리기의 주요 부품에 대한 성능 평가를 수행하였다.
Materials and Methods
다목적 관리기
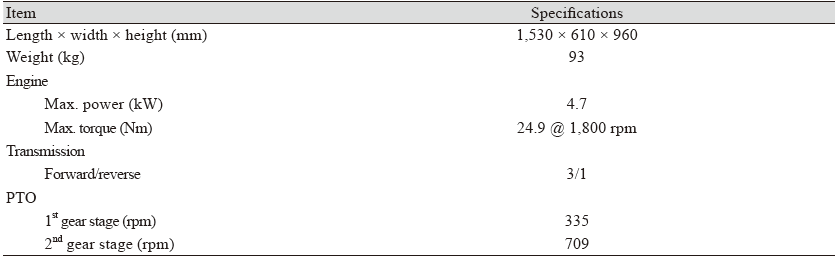
본 연구에서 활용한 다목적 관리기(ASC-620, ASIAtech, Daegu, Korea)의 총 중량은 약 93 kg이며, 크기는 1,530 mm (L) × 610 mm (W) × 960 mm (H)이다. 다목적 관리기에 적용된 엔진(GB180LN, Mitsubishi Heavy Industries, Tokyo, Japan)의 최대 출력과 최대 토크는 엔진 회전속도 1,800 rpm 조건에서 각각 4.7 kW, 24.9 Nm이다. 다목적 관리기의 엔진에서 생성된 동력은 벨트 풀리를 통해 변속기와 PTO (power take-off)로 전달된다. 주행 단수는 전진 3단, 후진 1단으로, 1, 2, 3단 조건에서의 차속은 각각 1.3, 1.8, 4.0 km·h-1이며, PTO 단수는 총 2단으로, 1단과 2단 조건에서의 회전속도는 각각 335, 709 rpm이다. 다목적 관리기의 세부 제원은 아래 Table 1과 같다.
부하계측 시스템
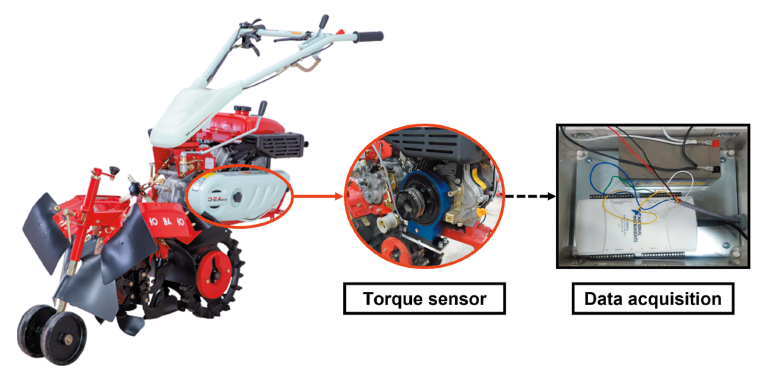
Fig. 1은 다목적 관리기의 부하계측 시스템이며, 작업 중 엔진 출력 토크를 측정하기 위한 토크 센서(T27 Hollow Flange, Interface Inc., Scottsdale, AZ, USA)와 계측기(NI USB-6212, National Instruments, Austin, Texas, USA)를 구성하였다. 계측기의 최대 샘플링 속도는 40 kS·s-1, 아날로그 데이터의 입력 분해능은 16 bit, 정확도는 50 ppm (0.005%)이며, 세부 제원은 아래 Table 2와 같다. 데이터 계측 소프트웨어는 LabVIEW (Ver 2017, National Instruments, Austin, Texas, USA)를 통해 개발하였으며, 실시간으로 토크 데이터를 계측 및 저장할 수 있도록 구성하였다.

필드시험
필드시험은 다목적 관리기의 작업 중 발생하는 부하를 계측하기 위해 경상남도 거창군 가조면에 위치한 필드에서 수행되었다. 시험토양의 환경을 알아보기 위하여 원추관입지수(cone index, CI), 수분함량 및 온도를 측정하였으며, 토양 환경 측정은 가로 10 m, 세로 10 m 간격으로 약 50개의 측정 지점에서 수행하였다. 원추관입지수는 원추관입계(SC900, Spectrum Technologies Inc., Aurora, Colorado, USA)를 통해 측정하였으며, 수분함량 및 온도는 토양수분계(TDR350, Spectrum Technologies Inc., Aurora, Colorado, USA)를 통해 측정하였다. 필드의 평균 원추관입지수, 수분함량, 온도는 각각 2,605 kPa, 30.4%, 28.9℃로 나타났다.
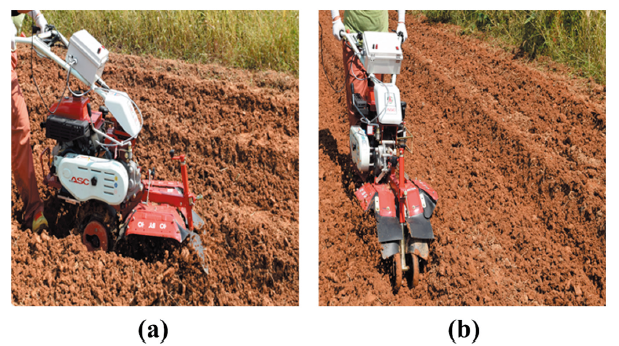
다목적 관리기의 필드시험은 Fig. 2와 같이 숙련된 작업자가 수행하였으며, 농작업은 토양 쇄토 작업 시 엔진에서 높은 부하가 발생하는 로터리 작업으로 선정하였다. 필드시험은 이동 시에만 사용되는 주행 3단(4.0 km·h-1, D3)을 제외하고 작업 시 주로 사용되는 주행 1단(1.3 km·h-1, D1) 및 2단(1.8 km·h-1, D2) 조건에서 3회 반복 수행하였으며, 이 때 PTO 단수는 1단(335 rpm, P1) 및 2단(709 rpm, P2)으로 선정하였다.
시뮬레이션 모델 개발
시뮬레이션 모델은 다목적 관리기의 성능 평가를 수행하기 위해 개발되었으며, 본 연구에서는 1D 상용 소프트웨어인 Simulation X를 사용하였다. 시뮬레이션 모델은 Fig. 3과 같이 electric model, mechanical model로 구성하였으며, 각 모델은 부품의 사양을 반영하여 개발하였다. 전기구동 다목적 관리기 시뮬레이션 모델은 기존 관리기의 동력원인 엔진을 모터 및 배터리로 대체하였으며, 부품의 세부 제원은 Table 3과 같다. 토크 입력 모델은 다목적 관리기의 작업 중 발생하는 부하 조건에 따른 시뮬레이션 해석을 수행하기 위해 구성하였다.
모터 모델은 기존 관리기에 사용되는 엔진과 유사한 출력이 가능한 6 kW급 BLDC (brushless direct currnet) 모터(25 Nm @ 2,300)를 선정하여 T-N (torque-rpm) 선도를 반영하였다. BLDC 모터는 일반 DC 모터와 비교해 브러쉬가 없어 고장이 적고 수명이 길며, 효율이 높아 장시간 작업을 수행하는 농업기계에 적합하다. 배터리는 모터의 정격 출력을 고려하여 전압 48 V, 용량 9.8 kWh의 제원을 가진 리튬 이온(lithium-ion) 배터리로 선정하였으며, 전압 및 용량은 시뮬레이션 단품 모델에 반영하였다. 리튬 이온 배터리는 에너지 밀도가 높아 소형 농업기계에 적합하며, 자가 방전율이 낮아 휴경기 동안 보관이 유리하다.
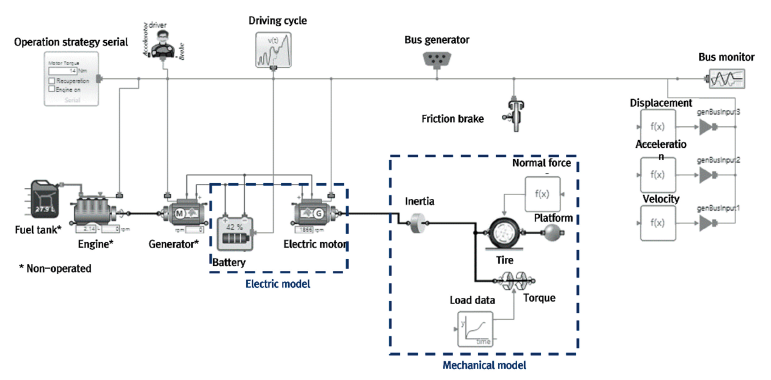
Table 3. Specifications of the simulation model of the electric multi-purpose cultivator.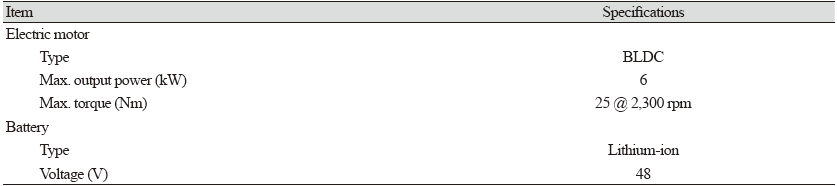
|
|
BLDC, brushless direct current. |
시뮬레이션 조건
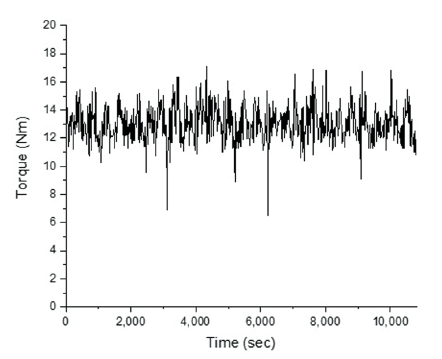
토크 입력 모델은 모터의 출력단에 적용하였으며, 모터의 출력 토크는 식(1)과 같이 공극(air-gap) 토크에서 가속(acceleration) 토크 및 마찰(friction) 토크를 제외한 값과 같다. 전기구동 다목적 관리기 모델은 시뮬레이션 해석을 진행할 경우 입력 토크에 따라 모터의 출력 토크 및 회전속도가 결정되도록 구성하였다. 토크 입력 모델에 적용되는 부하 데이터는 가혹조건에서 시뮬레이션을 수행하기 위해 주행 및 작업 단수에 따라 계측된 데이터 중 평균 토크가 가장 높은 데이터를 선정하여 Fig. 4와 같이 사이클 형태로 개발하였다. 개발된 부하 사이클은 10,800 sec 동안의 토크 데이터(D1P2)이며, 토크 입력 모델 내의 hyperbolic approximation 기능을 활용하여 최적화하였다. 시뮬레이션 시간은 배터리 연속 구동시간을 확인하기 위해 10,800 sec으로 설정하였으며, 시뮬레이션은 해석 시간 동안 모터에 지속적으로 토크가 작용하는 환경을 구현하여 수행하였다.
시뮬레이션 수행 시 배터리로부터 공급되는 전류는 모터의 회전속도 및 토크에 따라 변화하며, 인가된 전압 및 역률을 고려하여 식(2)와 같이 모터 출력이 계산된다. 토크 및 회전속도로부터 계산된 모터 출력축의 출력은 식(3)과 같이 모터의 출력에 기계적 변환 효율을 적용한 값과 동일하다. 배터리 SOC (state of charge) level은 식(4)와 같이 초기 SOC level, 배터리 용량, 모터에 전달되는 전류, 자가 방전율에 따라 결정되며, 시뮬레이션 입력 제원 및 모터 출력에 의해 계산된다.
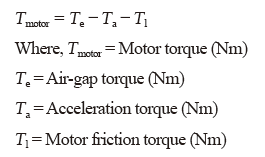 (1)
(1)
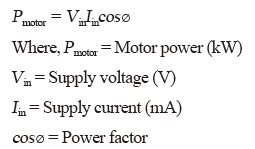 (2)
(2)
 (3)
(3)
 (4)
(4)
Results and Discussion
부하 데이터 분석
다목적 관리기의 로터리 작업 부하 데이터는 주행 단수 1단에서 PTO 회전속도에 따라 Fig. 5와 같이 나타났다. D1P1 조건에서 다목적 관리기의 엔진 출력 토크는 작업 구간에서 6.0 - 19.3 Nm의 범위로 나타났으며, 평균, 표준편차는 각각 10.7, 1.6 Nm로 나타났다. D1P2 조건에서 다목적 관리기의 엔진 출력 토크는 6.4 - 20.4 Nm의 범위로 나타났으며, 평균, 표준편차는 각각 13.0, 1.6 Nm로 나타났다. 엔진 출력 토크는 동일한 주행 단수(1단)에서 PTO의 회전속도가 높을 경우 평균 21% 높은 것으로 나타났으며, 이는 PTO 회전속도가 높아짐에 따라 엔진 부하가 높아지기 때문인 것으로 판단되었다.
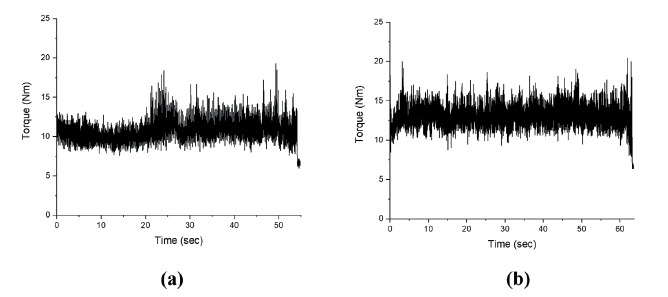
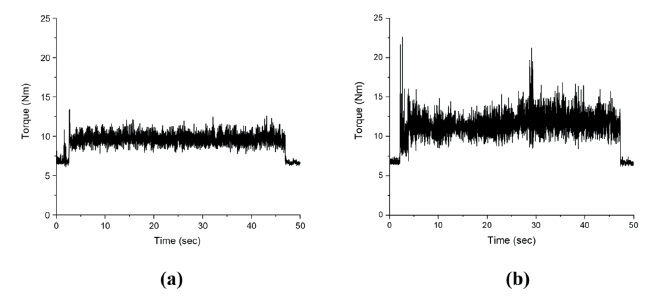
Fig. 6은 다목적 관리기의 주행 단수 2단에서 PTO 회전속도에 따른 로터리 작업 부하 데이터를 나타낸다. D2P1 조건에서 다목적 관리기의 엔진 출력 토크는 작업 구간에서 6.1 - 13.4 Nm의 범위로 나타났으며, 평균, 표준편차는 각각 9.4, 1.1 Nm로 나타났다. D2P2 조건에서 다목적 관리기의 엔진 출력 토크는 6.2 - 22.6 Nm의 범위로 나타났으며, 평균, 표준편차는 각각 11.2, 2.0 Nm로 나타났다. D2P2 조건에서 엔진 최대 토크는 작업 시작 직후인 2.2 - 2.6 sec에서 나타났으며, 이는 최초 구동 시 요구되는 토크가 높아 발생하는 현상으로 판단되었다. 엔진 출력 토크는 동일한 주행 단수(2단)에서 PTO의 회전속도가 높을 경우 약 19% 높은 것으로 나타났으며, 이는 주행 단수 1단 조건과 동일하게 PTO 회전속도가 높아짐에 따라 엔진 부하가 높아지기 때문인 것으로 판단되었다.
다목적 관리기의 주행 및 작업 단수에 따른 엔진 토크의 최대, 평균, 표준 편차 결과값은 Table 4와 같으며, 조건에 따라 엔진 출력 토크의 차이가 상이함을 확인하였다. Fig. 7은 작업 조건에 따른 다목적 관리기의 엔진 출력 토크를 box plot으로 나타낸 것이다. 다목적 관리기의 로터리 작업 시 엔진 평균 출력 토크는 D1P2, D2P2, D1P1, D2P1 순으로 높게 나타났으며, 엔진 토크는 주행 단수가 낮을수록, 작업 단수가 높을수록 크게 나타났다. 엔진 평균 출력 토크는 주행 단수 1단(D1P1, D1P2)에서 동일한 작업 조건(D2P1, D2P2)과 비교하여 각각 13, 16% 증가한 것으로 나타났다. 이는 낮은 주행속도에서 작업부의 부하가 증가함에 따라 엔진에서 출력하게 되는 토크가 증가하기 때문인 것으로 판단되었다. 로터리 작업 시 엔진 토크는 P1단 보다 P2단에서 분포 경향이 넓게 나타났다. 이는 PTO 회전속도가 증가함에 따라 PTO와 직결된 엔진의 부하 또한 높아져 토크 출력 범위가 넓어지기 때문인 것으로 판단되었다.
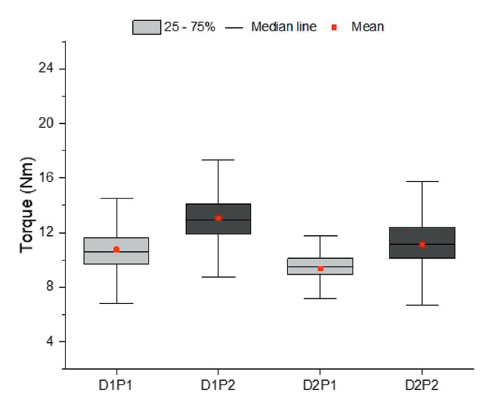
Table 4. Results of engine torque of multi-purpose cultivator during rotary tillage.
|
|
z Travel speed: D1 (1.3 km·h-1), D2 (1.8 km·h-1); power take-off (PTO) speed: P1 (335 rpm), P2 (709 rpm). |
시뮬레이션 결과
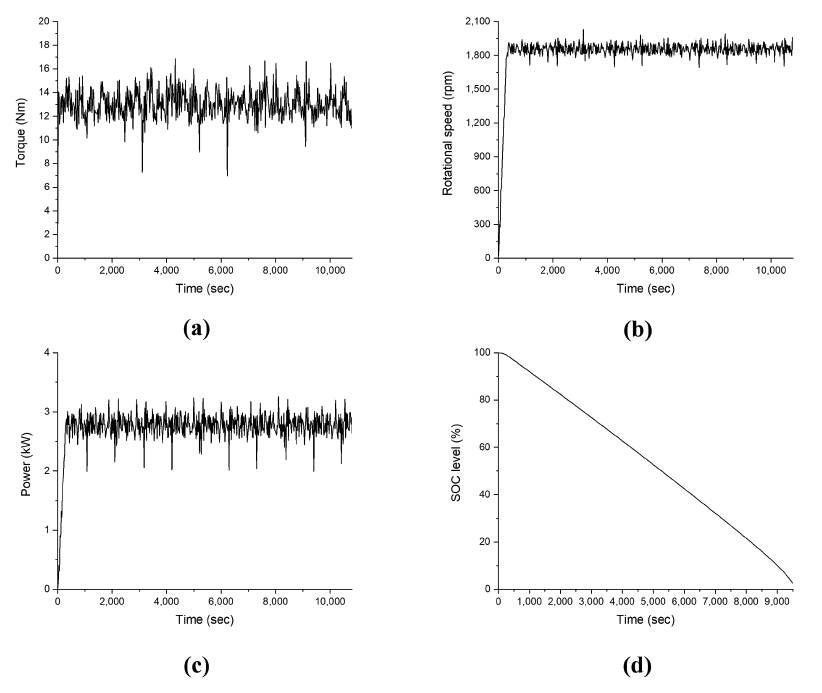
전기구동 다목적 관리기의 입력 부하에 따른 시뮬레이션 결과는 Fig. 8과 같이 나타났으며, 모터 토크, 모터 회전속도, 모터 출력, 배터리 SOC level에 대해 해석하였다. 모터의 토크 시뮬레이션 결과는 Fig. 8a와 같이 나타났으며, 최대 및 평균 토크는 약 16.8, 13.0 Nm로, 로터리 작업 시 부하가 발생할 경우 선정한 모터의 최대 70% 내의 토크를 사용하는 것으로 나타났다. 로터리 작업이 관리기를 활용한 작업 중 가장 큰 부하가 발생하는 점을 고려하면, 구굴, 배토 등 다른 농작업 또한 모터 출력 범위 내에서 수행 가능할 것으로 판단되었다. 모터의 회전속도 시뮬레이션 결과는 Fig. 8b와 같이 1,693 - 2,033 rpm의 범위로 나타났으며, 평균 회전속도는 1,832.7 rpm으로 나타났다. 모터의 회전속도는 입력 부하에 따라 필요 토크를 대응하기 위해 변화하였으며, 선정한 모터의 최대 68% 내의 회전속도를 사용하는 것으로 나타났다. 모터의 출력 시뮬레이션 결과는 Fig. 8c와 같이 2.0 - 3.3 kW의 범위로 나타났으며, 전기구동 다목적 관리기의 작업 중 평균 출력은 2.7 kW로 나타났다. 모터의 출력은 입력 부하에 따른 모터 토크 및 회전속도에 의해 변화하였으며, 선정한 모터의 최대 45% 내의 출력을 사용하였다. 선정된 모터는 1.5의 안전율을 고려하였을 때 토크, 회전속도, 출력 모두 사용 범위를 만족하며, 3시간 연속작업 수행이 가능한 것으로 나타났다. Fig. 8d는 작업 중 전기구동 다목적 관리기에 탑재된 배터리의 SOC level 해석 결과이다. 현재 장착된 배터리는 약 9,550 sec의 시간동안 작업이 가능한 것으로 나타났으며, SOC level의 평균 분당 감소율은 약 0.6%로 나타났다. 시간 당 소요되는 전력량은 약 3.53 kWh이며, 최소 10.6 kWh의 용량을 가진 배터리를 통해 3시간 작업이 수행 가능하다. 하지만 배터리 용량은 연속작업을 수행해야 하는 농작업 특성과, 발열에 따른 전력 소모가 증가하는 배터리의 특성을 고려해야 하며, 안전율을 적용하여 용량을 기존보다 약 1.5배 증가시킬 경우 목표 연속작업 시간인 3시간을 만족 가능하다. 또한, 농작업 시 발생하는 변동 부하에 따른 모터의 최적 토크 출력 제어 알고리즘 및 전력 소모량을 최소화하는 제어 전략을 통해 작업 시간 등 성능 개선이 가능할 것으로 판단되었다.
Conclusion
본 연구는 전기구동 시스템이 적용된 다목적 관리기 설계에 대한 기초 연구로써, 시뮬레이션 해석을 통해 선정 부품의 성능 평가 및 개선 방안을 제시하였다. 시뮬레이션 해석 조건은 기존 엔진 구동형 관리기의 로터리 작업 중 발생하는 엔진 부하 데이터이며, 부하계측 시스템을 구성하여 데이터를 수집하였다. 엔진 부하 데이터는 주행 및 작업 단수에 따라 다르게 나타났으며, 엔진 평균 출력 토크는 D1P1, D1P2, D2P1, D2P2 조건에서 각각 10.7, 13.0, 9.4, 11.2 Nm로 나타났다. 부하 사이클은 입력 부하가 지속적으로 발생하는 환경에서 시뮬레이션을 수행하기 위해 개발되었으며, 작업 조건 중 가장 높은 부하가 발생하는 D1P2 조건의 엔진 부하 데이터를 통해 개발하였다. 시뮬레이션 결과, 전기구동 다목적 관리기의 모터 토크, 회전속도, 출력의 최대값은 각각 16.8 Nm, 2,033.3 rpm, 3.3 kW로 나타났으며, 모터 최대 출력 범위의 70, 68, 45% 내의 구간에서 작업을 수행하는 것으로 나타났다. 모터 출력의 안전율을 고려하였을 때, 현재 선정된 모터는 전기구동 다목적 관리기에 적합한 것으로 판단되었다. 그러나, 배터리 SOC level의 분당 감소율은 약 0.6%로, 9,550 sec 동안 전력을 공급 가능한 것으로 나타나 목표 연속 작업 시간을 만족하지 못하였다. 전기구동 다목적 관리기의 성능은 시뮬레이션 결과를 바탕으로 배터리 용량을 기존 선정 용량 대비 약 1.5배 증가시키거나, 모터 제어 전략을 최적화함으로써 개선 가능할 것으로 판단되었다. 또한 시뮬레이션 모델은 다목적 관리기뿐만 아니라, 전기 모터 기반의 전동 소형 농업기계 설계 및 최적화에 활용할 수 있을 것으로 기대된다. 본 연구에서는 전기구동 다목적 관리기의 시뮬레이션 모델을 개발하고 기존 엔진 구동형 관리기의 부하 데이터를 활용하여 해석을 수행하였다. 그러나 시뮬레이션 모델은 핵심 부품의 제원과 입력 부하만을 고려하여 해석되었기 때문에 결과의 신뢰성 확보를 위해 실차 시험 및 데이터 분석이 필요하다. 향후 연구에서는 본 연구의 결과를 활용하여 전기구동 다목적 관리기를 개발하고, 부하 계측 시스템을 구성하여 실차 시험을 수행함으로써 성능 평가 및 모델 검증에 대한 연구를 수행할 예정이다.
Authors Information
Seung-Yun Baek, https://orcid.org/0000-0001-7330-6949
Wan-Soo Kim, https://orcid.org/0000-0001-9669-4761
Seung-Min Baek, https://orcid.org/0000-0002-4627-191X
Hyeon-Ho Jeon, https://orcid.org/0000-0003-0998-3819
Jun-Ho Lee, https://orcid.org/0000-0002-4131-9718
Dae-Hyun Lee, https://orcid.org/0000-0001-9544-5974
Kyu-Hong Choi, https://orcid.org/0000-0002-1335-7557
Yong-Joo Kim, https://orcid.org/0000-0002-1212-9018
Seung-Muk Choi, Ministry of Agriculture, Food and Rural Affairs, Senior deputy director

