
Introduction
벼 수확 후 이모작으로 겨울철에 재배하는 마늘과 양파는 농가소득측면에서 중요한 농산물이자 한국의 대표적인 조미 채소로 일반 가정에서 요리, 가공 식품 등에 이용되어 쉽게 찾아볼 수 있다(Lee and Hong, 2016). 특히 매운 맛을 내는 향신료로서 좋지 않은 냄새 등을 막고 식욕 촉진과 소화를 돕는 중요한 역할을 한다. 또한 항암(Nakagawa et al., 2001), 항균 및 항산화 작용(Ramos et al., 2006) 등과 같은 약리효과에 대한 성분들도 밝혀지면서 기능성 식품으로 이용되는 사례도 꾸준하게 증가하고 있다(Jung and Park, 2013).
2018년도 마늘과 양파의 생산량은 약 185만톤으로 조미 채소 전체 생산량 중 약 70%를 차지하고 있고 재배면적도 2017년 마늘 24,864 ha, 양파 19,538 ha에 비해 2018년 마늘과 양파의 재배면적은 각각 28,351, 26,425 ha로 증가하는 경향을 나타내 마늘과 양파의 소비가 증가하고 있는 추세에 맞추어 생산도 증가하였음을 알 수 있다(KOSIS, 2019).
마늘과 양파를 재배하는 과정은 크게 경운 및 정지, 파종 및 정식, 비닐 피복, 방제, 수확 등과 같이 5가지 작업으로 나눌 수 있는데 그 중 수확 단계에서 줄기 제거, 피복 비닐 수거, 굴취, 수집 등과 같이 세밀하게 분류할 수 있다. 농업에서 비닐을 피복하는 목적은 지온 유지, 토양의 유실 및 잡초 발생 방지가 가장 대표적이다. 하지만 수확 시기에 피복된 비닐을 수거하는 것은 많은 노동력을 필요로 한다. Lee et al. (1993)과 Sin et al. (1993)에 의하면 마늘, 양파 재배에 이용된 피복 비닐을 수거하는데 10 a 당 각각 7.90, 11.83 시간이 소요된다고 보고하였다.
폐 피복 비닐을 수거할 때 비닐에 줄기, 흙 등과 같은 이물질이 붙어있어 무게와 부피가 커 고령의 노동자들은 폐 비닐 수거 작업을 기피하여 보통 경작지에서 비닐을 수거하지 않거나 찢어진 상태로 방치를 하고 수거된 비닐은 소각하고 있다. 피복 비닐을 제대로 수거하지 않으면 토양의 생물 군집을 이동시켜 토질 변화와 탄소 및 질소 대사 촉진으로 인하여 토양 유기물이 악화되기 때문에 종자의 발아나 뿌리 발육을 억제하는 등의 토양 오염과 비, 농업 용수, 지하수 등을 통해 수질 오염을 야기시킬 수 있다. 피복 비닐을 소각하는 경우, 연소가스에서 발암물질인 다이옥신이 2,228 pg·kg-1이 발생되어 대기 오염뿐만 아니라 인체에도 유해한 영향을 미친다(Kim, 2008).
최근 Kim (2017)의 연구결과에 의하면 영농 폐비닐을 재활용하면 HDPE (high density polyethylene)재질은 146,738 won·ton-1, LDPE (low density polyethylene)재질은 176,921 won·ton-1의 순편익을 발생시켜 경제성이 있는 것으로 판단하였다. 한국환경공단에서 2012년 제시한 영농 폐 피복 비닐의 판정기준에 의하면 수거 상태에 따라 등급을 매겨 수거보상금을 달리 책정하였으며 최대 kg 당 80원이 차이가 난다. 따라서 농가에서는 폐 피복 비닐을 찢어짐 없이 깨끗하게 수거할 필요가 있다(K-eco, 2012).
위와 같은 문제들을 해결하기 위해 피복 비닐 수거 작업의 기계화는 반드시 필요하다. 국내에서도 피복 비닐 수거를 위한 연구가 많이 수행되고 있으며 특히 트랙터의 PTO (power take-off)와 유압으로 동력을 전달하는 방식이 가장 많이 이용되어지고 있다. Kim et al. (1995)은 마늘의 평두둑용 및 둥근두둑겸용 트랙터 부착형 비닐 수거기를 개발하였으나 수거 시 찢어짐 현상이 빈번하고 수거된 상태가 미흡하였다. 또한 Kim et al. (2008)에 의해 개발된 유압을 이용한 트위스트 휠 방식의 피복 비닐 수거기는 연구결과에서 안정적인 비닐 수거가 가능하다고 하였다. 하지만 트랙터 주행에 따른 피복 비닐 수거의 결과를 확인할 수 없어 추가적인 실험을 통해 검증 및 보완해야할 필요가 있다. 또한 국내 3 - 4개 업체에서 일본에서 개발된 폐 피복 비닐 수거기를 국내 실정에 맞게 벤치마킹하여 생산 및 판매를 하고 있으나 작물 별 사용되는 피복 비닐의 두께 차이, 장기간 피복으로 인한 경화된 상태, 그리고 지형 및 기후적인 특성에 따른 피복 비닐 관리 방법 등이 표준화 되어있지 않아 잦은 문제 발생으로 인하여 효율적인 작업이 이루어지지 못하였다. 그래서 아직도 많은 농가에서는 인력에 의존하여 피복 비닐을 수거하고 있는 실정이다.
따라서 본 연구에서는 안정적으로 폐 피복 비닐을 수거하기 위하여 유압모터와 유압비례제어밸브 등 유압시스템을 이용하여 변화하는 수거 드럼의 지름에 따른 수거 회전속도, 트랙터 주행속도와의 관계 등을 모두 고려한 트랙터 부착형 피복 비닐 수거기 개발을 하고자 하였다. 이후, 현장 테스트를 통해 피복 비닐 수거기의 성능을 검증하였다.
Materials and Methods
폐 피복 비닐 수거기 설계 및 개발
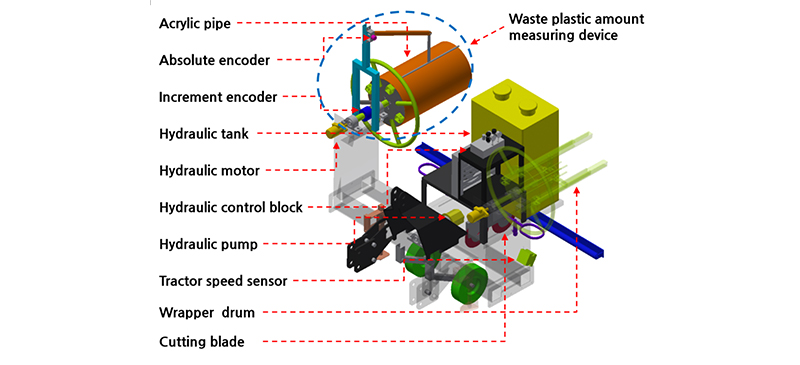
폐 피복 비닐 수거기는 Fig. 1의 구상도와 같이 유압펌프, 유압모터, 비닐수거 드럼, 비닐 수거량 측정장치, 차속센서(Radar II, DICKEY-john, Auburn, USA) 등으로 구성하도록 하였다. 트랙터가 주행하면 폐 비닐은 수거기 중앙부 하단에 위치한 절단 칼날에 의해 비닐의 중앙 부분에서 절단되어 좌, 우에 위치한 양쪽 비닐 수거 드럼에 수거된다. 그 후, 수거량 측정 장치가 수거된 비닐의 양을 측정하고 차속 센서에 의해 측정된 주행속도를 고려하여 전자유압 비례밸브와 마이크로 컨트롤러에 의해 유압모터가 제어되어 수거 속도를 제어한다.
피복 비닐 수거 속도 결정
피복 비닐의 수거 속도가 주행 속도보다 빠르면 피복 비닐에 걸리는 인장력이 커져 비닐이 찢어질 확률이 높아지고 반대로 수거속도가 주행 속도보다 느리면 비닐 수거가 불가능하다. 따라서 피복 비닐이 찢어짐 없이 연속적으로 수거되기 위해서는 트랙터의 주행속도와 비닐을 수거하는 속도가 동일하여야 하며 연속적으로 증가되는 비닐 수거량을 정확하게 측정하는 것이 중요하다.
피복 비닐 수거를 위해 지름 294 mm의 수거 드럼을 좌, 우 유압모터에 각각 설치하고, 유압모터와 비닐 수거 드럼을 연결하는 축에 중공축 엔코더(E100H-35, Autonics, Busan, Korea)를 설치하여 수거 드럼의 회전 속도를 측정하였다. 또한 균일한 반지름 측정을 위해 외경 300 mm, 두께 3 mm의 아크릴 파이프를 설치하였다.
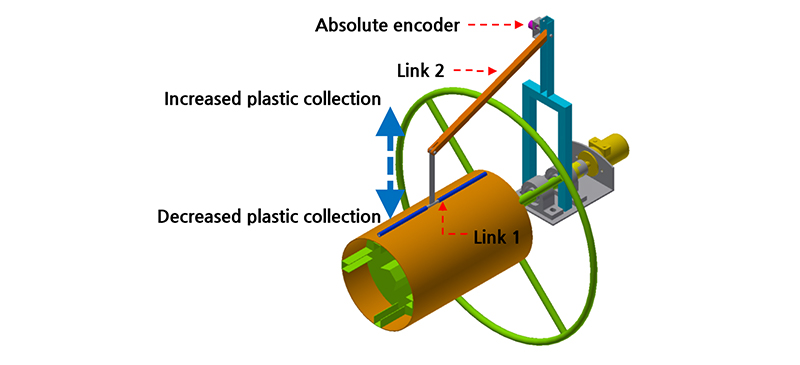
수거된 비닐의 두께를 측정하는 장치는 Fig. 2와 같이 제작하였다. 수거된 비닐에 의해 드럼의 반지름이 증가됨에 따라 링크 1과 2는 위쪽으로 움직인다. 반대로 수거된 비닐을 드럼에서 제거한 후에는 링크 1과 2는 아래쪽의 제자리로 이동한다. 이때, 링크 2에 연결된 절대치 엔코더(SAE360CAP -12N, SEAR, Samwon-Sera Engineering Co., Ltd., Anyang, Korea)의 출력 전압 값을 이용하여 캘리브레이션을 통해 증가된 반지름을 측정하였다.
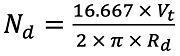
본 연구에서는 트랙터의 최대 주행 속도를 4 km·h-1로 설정하고 식(1)을 통해 필요한 피복 비닐 수거 드럼의 회전속도를 계산하였다.
 (1)
(1)
Nd: 피복 비닐 수거 드럼의 회전속도(rpm), Rd: 수거 드럼의 반지름(m), Vt: 트랙터의 주행속도(km·h-1)
식에서 나타난 16.667의 상수 값은 km·h-1의 속도 단위를 m·min-1으로 변경하기 위해 사용되어진 값이며 피복 비닐 수거기에 부착된 수거 드럼의 반지름이 0.15 m이고, 트랙터의 작업 주행 속도는 4 km·h-1라고 하였을 때 최대 71 rpm으로 회전할 필요가 있는 것으로 판단되었다. 본 연구에서는 수거 드럼의 최대 속도를 80 rpm으로 설정하여 유압시스템을 설계하였다.
유압시스템 구성 및 제작
유압모터와 유압펌프를 선정하기 위해 최대 토크 값(T)을 식(2)를 통해 계산하였다. 최대 토크 값은 수거 드럼에 의해 발생되는 토크(Td), 수거된 비닐에 의해 발생되는 토크(Tp), 그리고 비닐 장력에 대한 토크(Tt)의 합으로 계산하였다. 피복 비닐이 최대로 수거된 경우 드럼의 반지름은 0.55 m, 수거되지 않은 드럼의 반지름은 0.15 m, 수거 드럼의 질량은 17 kg, 최대로 수거된 피복 비닐의 질량은 30 kg, 그리고 비닐을 당겼을 때 발생하는 최대 장력은 실험을 통해 15 kgf로 결정하였다. 비닐 수거기의 드럼을 정지상태에서 1 s 동안 최대 회전속도 80 rpm으로 가속시켰다고 가정하였을 때 최대 토크는 약 12.74 kgf∙m로 계산되었다.
 (2)
(2)
Id: 피복 비닐 수거 드럼의 관성 모멘트(kg∙m-2), Ip: 피복 비닐의 관성 모멘트 (kg∙m-2), Rmax: 피복 비닐이 수거된 드럼의 반지름(m), Rmin: 피복 비닐이 수거되지 않은 드럼의 반지름(m), αd: 수거 드럼의 각 가속도(s-2), Md: 수거 드럼의 질량(kg), Mp: 피복 비닐의 질량(kg), ΔNd: 수거 드럼의 회전속도 변화량(rpm), Δt: 피복 비닐 수거 시 시간 변화(s), tp: 비닐을 당겼을 때 발생하는 장력(kgf)
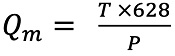
유압모터의 회전 당 용적(Qm)은 계산된 최대 토크 값(T) 과 농작업기계에서 흔히 사용되는 유압시스템의 압력 범위를 고려하여 100 bar로 작동 압력(P)을 설정하여 식(3)으로부터 구하였다.
 (3)
(3)
유압모터의 소요유량(Q)의 계산은 유압모터의 회전 당 용적(Qm)과 유압모터의 요구 회전속도(Nd), 용적효율(ηv) 0.9를 이용하여 식(4)와 같이 계산하였다(CASAPPA, 2019).
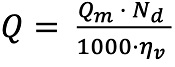 (4)
(4)
마지막으로 유압 펌프의 유량(Qp)는 식(5)와 같이 유압모터의 소요유량(Q)과 트랙터 PTO의 회전속도(Np) 540 rpm, 용적효율(ηv)을 이용하여 계산하였다.
 (5)
(5)
계산결과, 유압모터의 유량은 80 cc·rev-1, 유압펌프의 유량은 14.6 cc·rev-1으로 나타났으며 본 연구에서는 80 cc·rev-1의 유압모터(MP80CD/5, M + S, Bulgaria)와 각 16 cc·rev-1의 용량을 가진 더블 유압펌프(PLP20-20-20, Casappa, Parma, Italy)를 선정하여 피복 비닐 수거기 개발에 사용하였다.
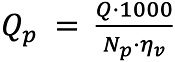
유압시스템은 트랙터의 PTO 축을 통해 연결된 더블 유압펌프를 통해 유압유가 공급되고 릴리프 밸브(DB4E-01X-350V, Hydac, Sulzbach, Germany)를 이용하여 최대 작동 압력을 100 bar로 설정하였다. 그리고 방향전환 밸브(WK08GC-01-C-N-12DG, Hydac, Sulzbach, Germany)는 피복 비닐 수거 작업을 하지 않을 때, 유압유를 유압 탱크로 되돌려 보내 유압회로 내에 불필요한 압력과 온도 상승을 방지하는 로딩/언로딩 역할로 사용하였다. 전자유압 비례밸브(CE000831, Atlantic Fluid Tech, Modena, Italy)는 유압모터로 흐르는 유량을 제어하여 수거 드럼의 회전 속도를 제어하기 위해 사용하였다. 비닐 수거 드럼과 마찬가지로 유압모터는 좌, 우에 1개씩 설치하였고 유압유 탱크는 더블펌프 용량의 약 2배 크기로 선정하여 70 L의 탱크를 설치하여 시스템을 구성하였다(Fig. 3).
트랙터 주행 속도 측정
트랙터 주행 속도 측정은 도플러 방식의 차속센서를 이용하였고 Dickey-john (2017)의 연구에서 제시된 지면으로부터 457 - 2,438 mm 떨어진 높이에 35 ± 5˚ 각도로 차속센서를 설치하는 방법을 참고하여 본 연구에서는 지면에서 1,200 mm 높이로 35˚ 각도로 센서가 후방을 향하도록 비닐 수거기에 설치하여 트랙터의 주행 속도를 측정하였다.
폐 피복 비닐 수거기 개발
Fig. 1의 구상도를 기반으로 Fig. 4(a)와 같이 피복 비닐 수거 장치, 유압시스템, 트랙터 주행 속도 측정 장치 등을 포함한 폐 피복 비닐 수거기를 개발하였다. Fig. 4(b)는 피복 비닐을 절단하기 위한 칼날이 설치된 모습으로 피복 비닐 수거기 중앙부 하단에 위치하여 트랙터가 주행을 하면 이 칼날에 의해 양쪽으로 비닐이 절단된다.

폐 피복 비닐 수거기 제어시스템
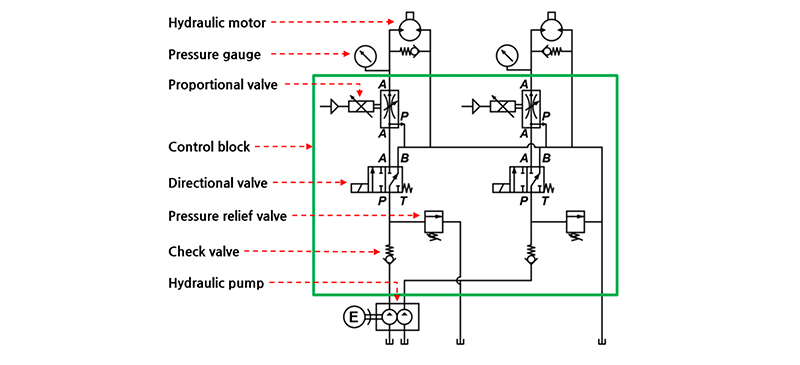
폐 피복 비닐 수거기의 작동 원리는 Fig. 5의 순서도와 같이 트랙터가 주행을 시작하면 주행속도를 측정한다. 주행속도가 0.5 km·h-1 미만이면 시스템의 작동을 멈추고 0.5 km·h-1 이상이면 피복 비닐 수거 드럼의 비닐 수거량을 측정한다. 측정된 주행속도와 피복 비닐 수거량 값을 이용하여 필요 수거 드럼의 회전속도를 계산하고 전자유압 비례밸브를 통해 유압모터 작동 및 속도를 제어한다. 유압모터가 작동하면 회전속도를 측정하고 앞에서 계산된 수거 드럼의 필요 회전속도와 비교하여 같으면 속도를 유지하고 계산된 수거 드럼의 속도에 비해 유압모터의 속도가 높다면 비례제어기를 통해 밸브를 제어하여 유압모터의 속도를 낮추고, 반대로 유압모터의 속도가 낮다면 유압모터의 속도를 높이게 된다. 해당 원리를 반복하여 진행함으로써 피복 비닐 수거 시에 유동적으로 속도 조절이 가능하게 된다.
폐 피복 비닐 수거기의 속도를 제어하기 위하여 Fig. 6과 같은 제어시스템을 개발하였다. 제어시스템은 ATmega 2560을 기반으로 한 마이크로 컨트롤러(Arduino Mega 2560, Interaction Design Institutelvera, Milano, Italy)를 중심으로 구성되어 있으며, 마이크로 컨트롤러의 인터럽터 기능을 이용하여 차속센서 출력인 주파수 값을 측정하였다. 실제 트랙터 주행속도(km·h-1)는 센서의 출력주파수/27.45 Hz의 공식을 통해 측정하였다(Dickey-john, 2017).
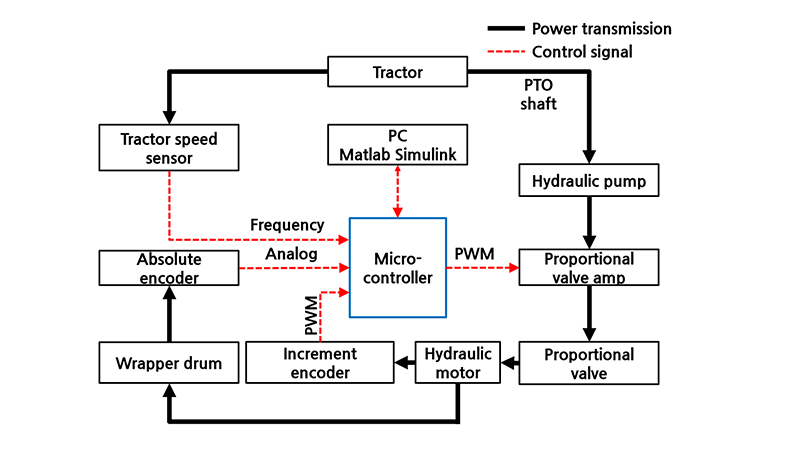
전자유압 비례밸브를 구동시키기 위한 앰프의 최대 제어전압은 10 V이고 마이크로 컨트롤러의 PWM (pulse width modulation) 출력의 최대전압은 5 V이므로 연산증폭기(OP07CP, TEXAS INSTRUMENTS, Texas, USA)를 이용하여 비반전 증폭기를 설계하여 PWM 출력신호를 2배 증폭하여 앰프에 입력하여 유압모터를 제어하였다. 또한 피복 비닐 수거 드럼의 반지름 변화에 따른 정확한 피복 비닐 수거 드럼의 회전속도 제어를 위해 증분형 중공축 엔코더를 이용해 측정된 피복 비닐 수거 드럼의 회전속도를 측정하였고 마이크로 컨트롤러에 의해 계산된 피복 비닐 수거 드럼의 필요 회전속도를 비교하였다. 이후, 두 측정된 값의 차이에 따라 비례제어기(proportional controller)를 이용하여 피복 비닐 수거 드럼의 반지름 변화에 따른 정확한 회전 속도 제어가 가능하도록 하였다.
실내 및 현장 테스트를 통한 성능 검증
실내 테스트는 트랙터(D450, Daedong, Daegu, Korea)에 개발된 피복 비닐 수거기를 부착하여 두께 0.02 mm, 폭 600 mm, 길이 110 m의 피복 비닐을 수거하면서 두가지 성능시험을 수행하였다. 첫번째 성능시험은 트랙터 주행 속도는 일정한 상태에서 드럼의 반지름 증가에 따른 피복 수거 드럼의 회전속도 변화를 확인하는 시험으로 마이크로 컨트롤러를 통해 트랙터 주행속도를 설정하여 회전 속도 변화를 분석하였다. 두번째 시험은 트랙터의 주행속도를 임의로 변화시키는 동안 피복 비닐 수거 반지름의 변화에 따른 수거 드럼의 회전속도의 변화를 분석하였다.
현장 시험은 경남 진주시 가좌동에 위치한 경상대학교 포장에서 두께 0.02 mm, 폭 1200 mm, 길이 30 m의 피복되어 있는 비닐을 실제로 수거함으로써 개발된 폐 피복 비닐 수거기의 성능을 검증하고자 하였다.
Results and Discussion
피복 비닐 수거기의 제어시스템 분석
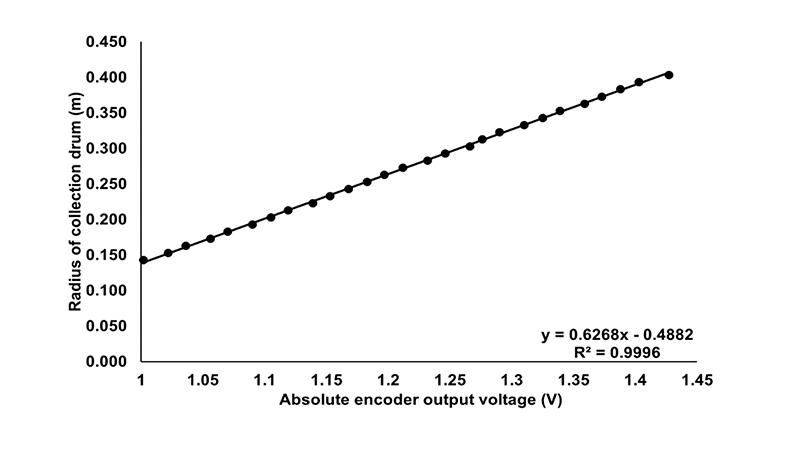
피복 비닐 수거 작업 중 증가된 수거 드럼의 반지름(Rd)과 수거량 측정 장치의 절대치 엔코더 출력 전압(VAE)과의 관계는 Fig. 7과 같이 0.9996의 상관관계로 매우 우수하였으며 도출된 제어식은 식(6)과 같았다. 이를 통해 절대치 엔코더의 출력 전압으로 피복 비닐 수거에 따른 수거 드럼의 반지름 변화를 측정할 수 있었다.
 (6)
(6)
Rd: 피복 비닐 수거 드럼의 반지름, VAE: 절대치 엔코더 출력 전압
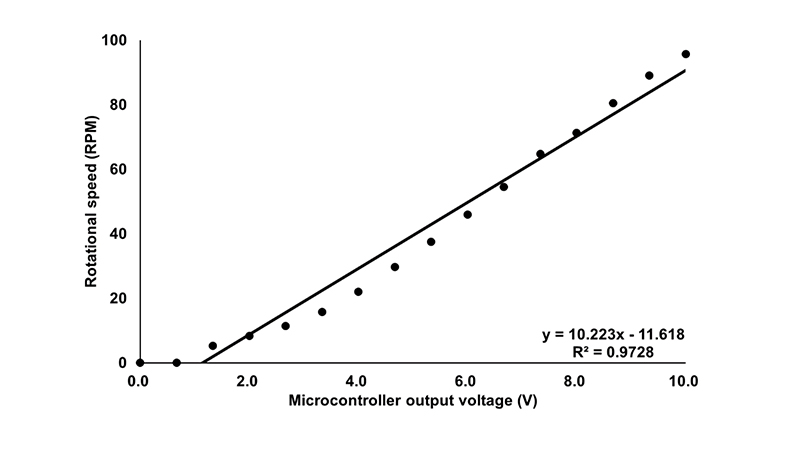
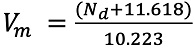
마이크로 컨트롤러의 출력전압과 피복 비닐 수거 드럼의 회전속도는 Fig. 8과 같이 선형 상관관계에서 R2이 0.9728로 나타났으며 마이크로 컨트롤러의 출력전압 3 - 7 V 사이에서는 약간의 비선형 구간으로 오차가 발생함을 알 수 있었다. 그리고 출력전압 0 - 1 V까지는 전자유압 비례유량제어 밸브의 불감대 영역으로 유압모터가 제대로 반응하지 않음을 알 수 있었다. 유압모터 속도를 제어하기 위한 마이크로 컨트롤러의 출력전압 값을 추정할 수 있는 관계 식(7)을 도출하였고, 식(1)로부터 계산된 필요 수거 회전속도(Nd)를 식(7)에 대입하여 사용하였다.
 (7)
(7)
Vm: 유압모터 속도 제어를 위한 필요 마이크로 컨트롤러 출력 전압, Nd: 피복 비닐 수거 드럼의 회전 속도
실내에서의 수거 속도 성능 시험
현장 검증 시험 전 폐 피복 비닐 수거기의 성능과 문제점을 파악하기 실내에서 성능시험을 행하였다. 마이크로 컨트롤러를 통해 트랙터 주행속도는 1 km·h-1로 일정하게 유지하도록 설정한 뒤 110 m의 비닐을 수거하였을 때, 피복 비닐 수거 드럼의 반지름 변화에 따른 수거 드럼의 회전속도 제어 시험 결과는 Fig. 9와 같았다.
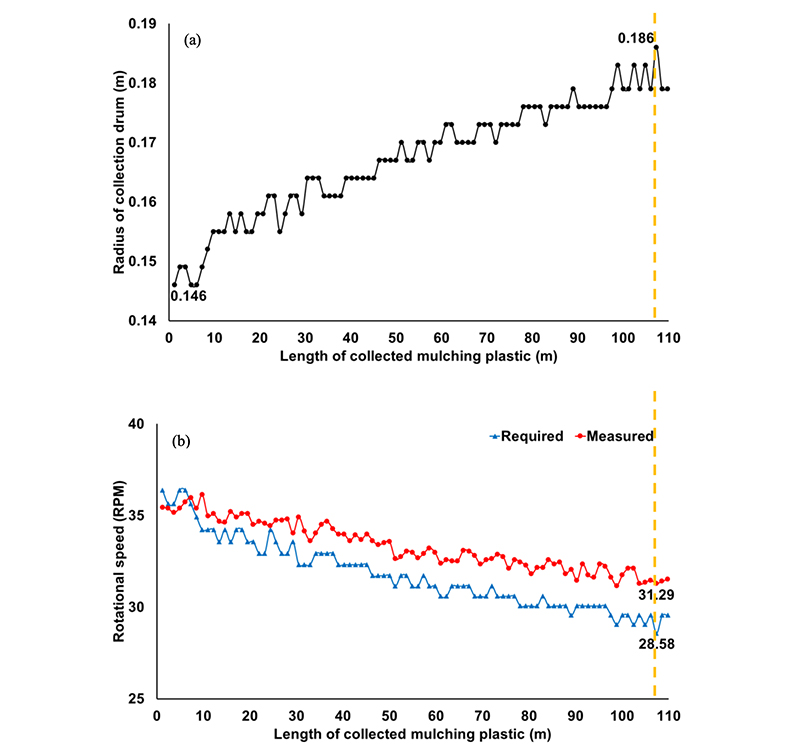
Fig. 9(a)는 110 m의 피복 비닐을 수거함에 따라 수거 드럼의 반지름 변화를 나타낸 것으로 최대 4 cm 증가하였다. Fig. 9(b)는 피복 비닐 수거에 필요한 회전속도와 실제 측정된 수거 드럼의 회전속도를 비교한 것으로 반지름이 증가할수록 수거 속도가 감소하였고 반지름이 최대 4 cm로 증가되었던 피복 비닐의 107 m 지점에서 필요 수거 회전속도는 28.58 rpm이지만 실제 측정된 수거 회전속도는 31.29 rpm으로 두 회전속도 간의 차이가 약 2.71 rpm으로 나타났다. 하지만 차이가 크지 않고 유압모터의 회전속도가 피복 비닐 수거에 필요한 회전속도를 잘 추종함으로 원활한 비닐수거가 될 것으로 판단하였다.
피복 비닐 수거 드럼에 수거된 비닐은 Fig. 10에서 볼 수 있듯이 비닐의 상태와 감기는 형태에 따라 같은 길이의 비닐을 수거하더라도 측정되는 반지름이 달라질 수 있을 것으로 판단되며 Fig. 9(a)의 결과와 같이 비닐을 연속적으로 수거하고 있음에도 불구하고 수거 드럼의 반지름의 길이가 증가되지 않고 일정하게 유지하거나 일시적으로 반지름 길이가 감소되는 현상을 발견할 수 있었다. 그리고 그래프에서 드럼의 반지름 측정값이 연속적으로 변화하지 않고 피크처럼 보이는 것은 좁은 동작범위에서의 절대치 엔코더 출력과 마이크로 컨트롤러의 아날로그/디지털 변환기의 분해능 때문이라고 판단된다.
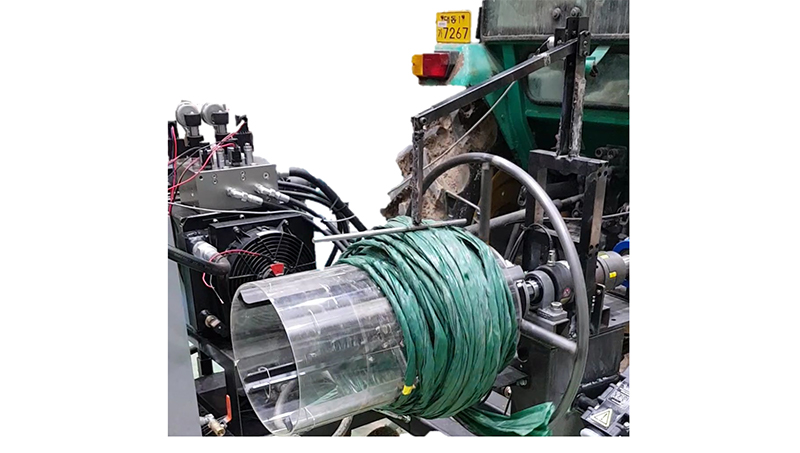
Fig. 11(a)는 트랙터를 0.5 - 4.5 km·h-1 범위 내 임의의 속도로 주행했을 때 피복 비닐 수거 작업 거리에 따른 드럼의 반지름 변화를 나타낸 것으로 앞의 시험과 마찬가지로 최대 4 cm 증가하였으며 Fig. 11(b)는 차속 센서에 의해 측정된 트랙터의 주행속도와 작업 중 피복 비닐 수거 드럼의 반지름 변화에 따른 수거 드럼의 필요 회전속도와 실제 회전속도를 나타낸 그래프이다. 피복 비닐 수거 드럼의 필요 및 실제 속도는 트랙터의 주행속도의 변화에 따라 동일한 경향을 보이며 유동적으로 변화하는 것을 확인할 수 있어 정상적인 피복 비닐 수거 작업이 가능할 것으로 판단되었다.
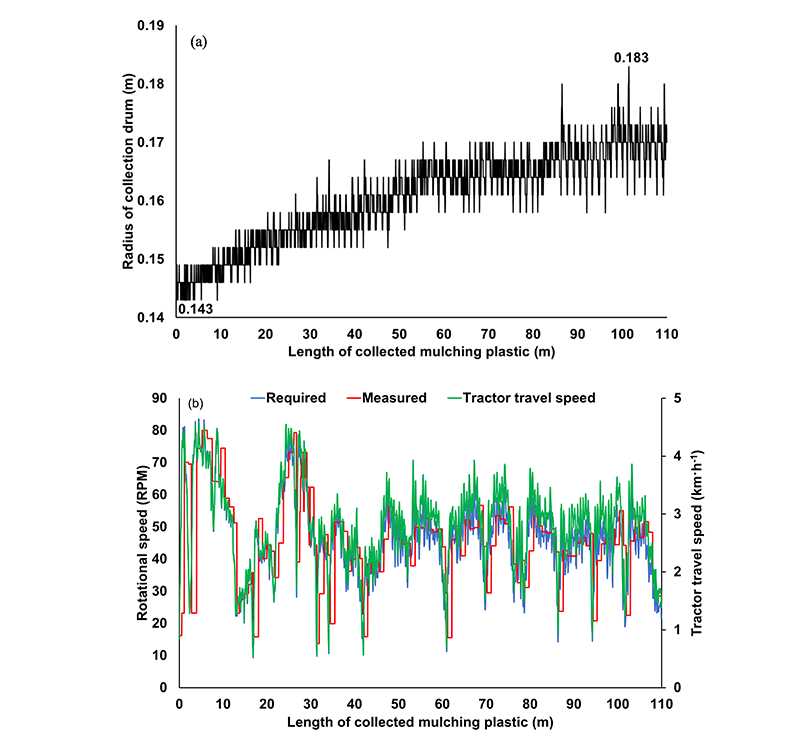
유압모터와 연결된 축에 설치된 증분형 엔코더 측정 값의 업데이트 주기를 1 s로 설정하여 Fig. 11(b) 그래프에서 확인할 수 있듯이 주행속도와 유량제어에 따른 데이터 수집의 지연 현상이 일어나는 문제가 발생하였으나 이부분은 데이터를 수집하는 업데이트 주기를 0.1초로 설정하여 해결하였다.
트랙터 부착형 피복 비닐 수거기 현장 검증
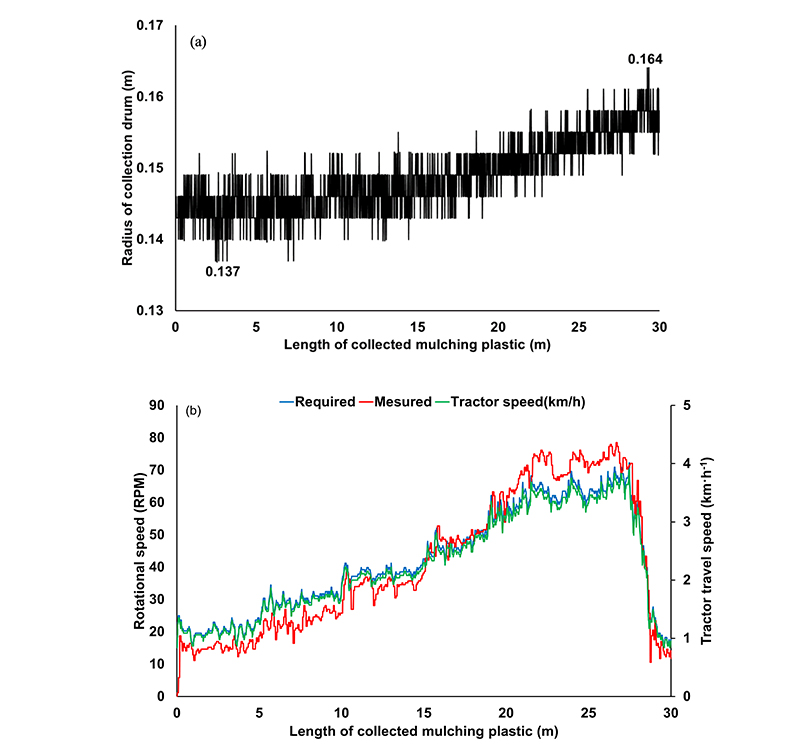
트랙터 부착형 피복 비닐 수거기 성능 검증과 현장에서 발생할 수 있는 문제점을 파악하고자 경상대학교 부속농장에 위치한 테스트 베드에서 피복 비닐 수거 시험을 실시하였다. 그 결과, Fig. 12(a)는 피복 비닐 수거 드럼의 반지름 측정 결과를 나타낸 것으로 30 m 길이의 피복 된 비닐을 수거하였을 때 2.7 cm 증가하였다. 실내 시험에서 110 m의 길이 중 약 30 m 지점의 피복 비닐을 수거했을 때 수거 드럼의 반지름이 15.5 cm였으나 현장 시험에서는 16.4 cm로 피복되어 있던 비닐에 흙, 기타 이물질 등으로 인해 증가하였음을 알 수 있었다. 실제 포장에서 장기간 사용된 폐 멀칭 비닐의 경우 훨씬 더 많은 양의 돌, 흙, 기타 이물질로 인해 수거부피가 커질 것으로 판단된다.
Fig. 12(b)에서는 트랙터 주행속도와 작업이 진행됨에 따라 드럼의 반지름이 변할 때 필요 수거 회전속도와 실제 수거 회전속도를 비교한 것이다. 트랙터 주행속도, 수거 드럼의 필요 및 실제 회전속도는 비슷한 경향을 보여 요구 rpm을 잘 추종하고 있다. 하지만 최대 14.28 rpm의 차이가 발생한 구간이 있었는데 유압모터와 전자유압 비례밸브의 비선형성과 기계적 진동, 노면의 불균일성 때문에 발생한 오차라고 판단된다. 현재 피복 비닐 수거기에서는 비례(proportional)제어를 통해 유압시스템을 구동하였지만 향후 연구에서는 비례적분미분(proportional integral derivative)제어기를 개발하여 수거성능을 개선하고자 한다.
또한 두둑 양쪽 가장자리의 비닐 위에 복토 된 흙이 단단하게 굳은 경우 비닐이 수거 드럼에 의해 원활히 걷어 올려지지 못해 인장 되다가 끝내 찢어지는 경우도 발생하였는데 향후 굳은 흙을 파쇄하는 장치가 추가적으로 필요할 것으로 판단된다.
Conclusion
본 연구의 목적은 부족한 농업인력을 대신하여 폐 피복 비닐의 손상을 최소화하여 연속적으로 수거하는 트랙터 부착형 폐 피복 비닐 수거기를 개발하는 것이다. 특히 유압 모터, 전자유압 비례제어, 릴리프, 방향전환 밸브 등을 이용한 유압식 비닐 수거기로 트랙터 주행속도를 고려하여 비닐이 안정적으로 수거되는 것을 목적으로 하였다. 비닐 수거 작업이 진행됨에 따라 수거된 비닐로 인하여 수거드럼의 부피가 커지게 되는데 비례제어 유량밸브를 통해 수거되는 속도를 적절하게 조절함으로써 연속적으로 비닐 수거가 가능하도록 하였다. 실내시험에서 110 m의 비닐을 수거하였을 때 최대 2.71 rpm의 수거 회전속도 오차를 보여 유압모터의 회전속도가 필요 회전속도를 잘 추종함으로 원활한 비닐수거가 되는 것으로 판단되었다. 하지만 현장 검증 과정에서 유압모터와 전자유압 비례밸브의 비선형성과 기계적 진동, 노면의 불균일성 때문에 최대 14.28 rpm의 회전속도 차이가 발생하였다. 추후 연구에서는 현재 적용한 비례제어를 대신하여 비례적분미분 제어를 개발하여 보다 정확한 제어시스템을 개발하고자 한다.
또한 두둑 양쪽 가장자리의 비닐 위에 복토된 흙이 단단하게 굳은 경우 비닐이 원활히 수거되지 못한 현상이 있었는데 향후 땅속작물 수확기의 상하 진동 원리를 이용한 굳은 흙 파쇄장치를 추가적으로 부착하는 등 개선 방안을 마련하고자 한다.
Authors Information
Hyo Je Park, Department of Bio-industrial Machinery Engineering, Gyeongsang National University, Ph.D. student
Sang Yoon Lee, Department of Bio-industrial Machinery Engineering, Gyeongsang National University, Ph.D. student
Yong Hyun Park, Department of Bio-industrial Machinery Engineering, Gyeongsang National University, Master student
Young Keun Kim, Department of Agricultural Engineering, National Institute of Agricultural Sciences, RDA, Researcher
Il Su Choi, Department of Agricultural Engineering, National Institute of Agricultural Sciences, RDA, Researcher
Young Jo Nam, Bulls Co., Ltd., CEO
Gi Young Kweon, Department of Bio-industrial Machinery Engineering, Gyeongsang National University, Professor


